

Control method based on fuzzy variable sliding model surface tracking differentiator
A technology of tracking differentiators and control methods, applied in electric controllers, controllers with specific characteristics, etc., can solve problems such as high-frequency signal attenuation, introduction of calculation noise, signal oscillation, etc., and achieve strong anti-interference ability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
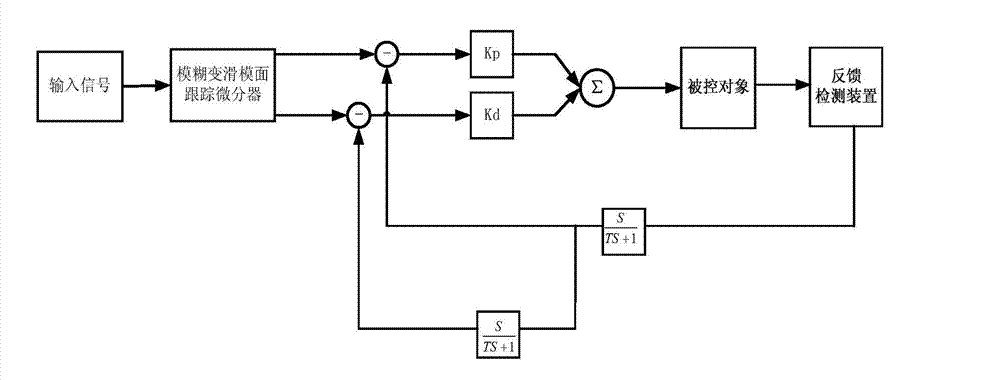
[0028] Such as figure 1 Shown is a system block diagram of the present invention. The specific implementation is as follows:
[0029] After tracking the input signal of the differentiator on the fuzzy variable sliding mode surface, use the obtained output velocity V 1 and the derivative of velocity a 1 After combining with the traditional PD controller, enter the controlled object for hybrid control.
[0030] Step 1: Initialize,
[0031] The input control signal of the fuzzy variable sliding mode surface tracking differentiator is v(t), and the output state of the fuzzy variable sliding mode surface tracking differentiator is (x,u) T , where x is used to track and reproduce the input control signal v(t), u is the derivative of x, and initialize the output state X of the fuzzy variable sliding mode surface tracking differentiator d =(x d , u d ) T =(0,0) T ; Error e=x-v(t),
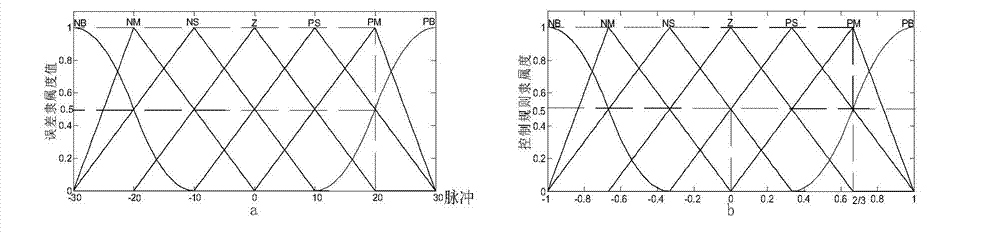
[0032] Step 2: Calculate the membership degrees of seven fuzzy sets corresponding to the erro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More