

Multi-unmanned aerial vehicle cooperative task planning simulation system based on VR-Forces simulation platform
A vr-forces, mission planning technology, applied in electrical program control, comprehensive factory control, etc., can solve problems such as difficulty, inconsistent distributed architecture, inability to effectively simulate UAV distributed coordination, etc., to ensure consistency performance, overcome inconsistencies in distributed architecture, and improve R&D efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
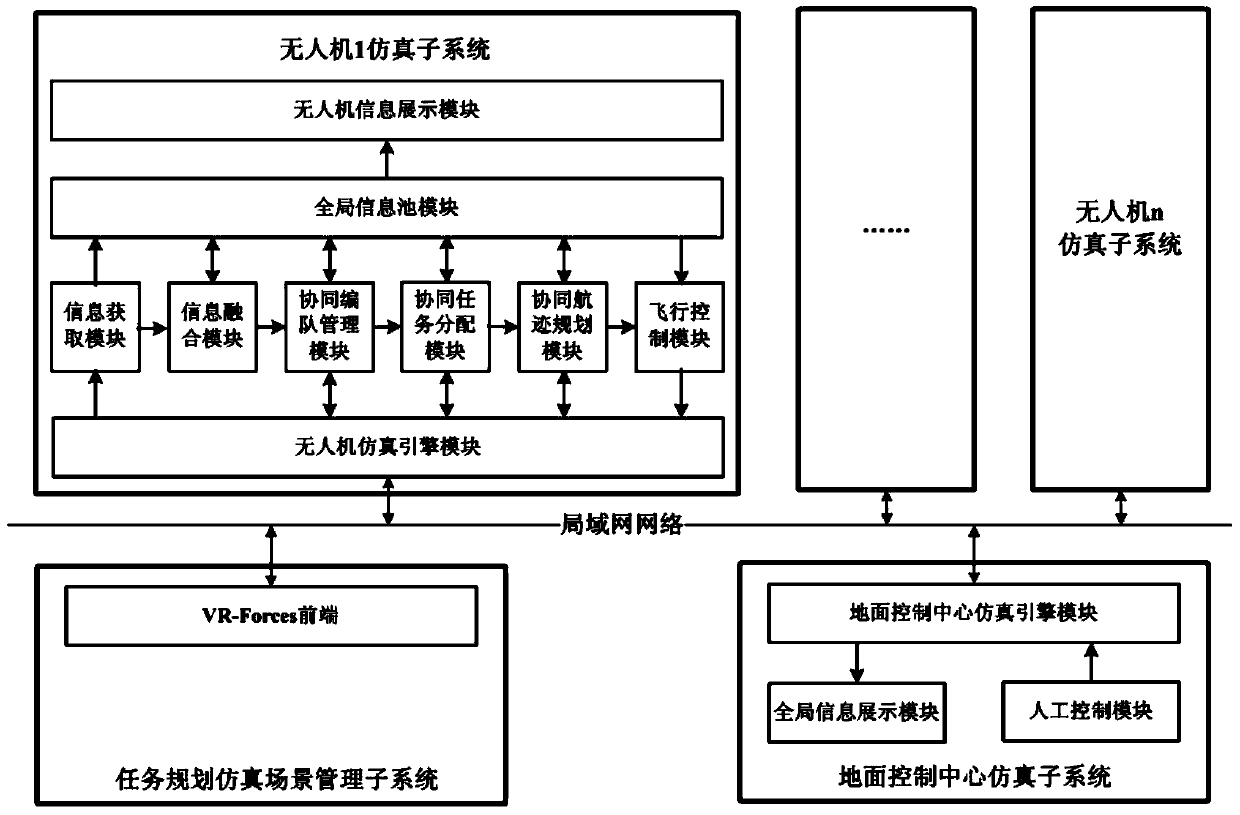
[0038] In order to make the technical solution of the present invention clearer and more complete, further description will be given below in conjunction with the accompanying drawings and a specific implementation case of a multi-UAV cooperative task planning scenario in which n UAVs are simulated to search m targets cooperatively in the present invention.
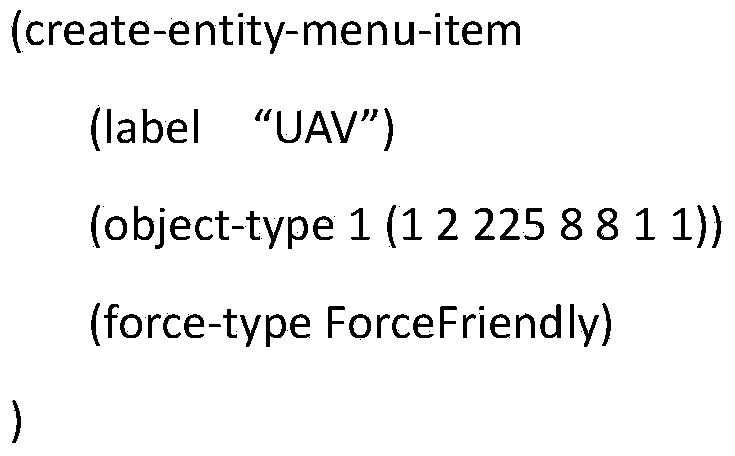
[0039] In this embodiment, a multi-UAV cooperative task planning simulation system based on the VR-Forces simulation platform is developed by using the VR-Forces simulation platform of the US MAK company which is widely used at present. The VR-Forces simulation platform is an HLA-based distributed simulation platform. It first encapsulates the underlying HLA with the VR-Link toolkit, and then encapsulates the VR with four types of application programming interfaces: simulation, graphical user interface, terrain, and remote control. -Link toolkit, which simplifies the development of distributed simulation system based on VR...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More