

Image registration method based on inertial sensor and camera
An inertial sensor, image registration technology, applied in image analysis, image data processing, instruments, etc., can solve the problems of low precision, difficult to popularize handheld devices and mobile devices, and large amount of calculation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
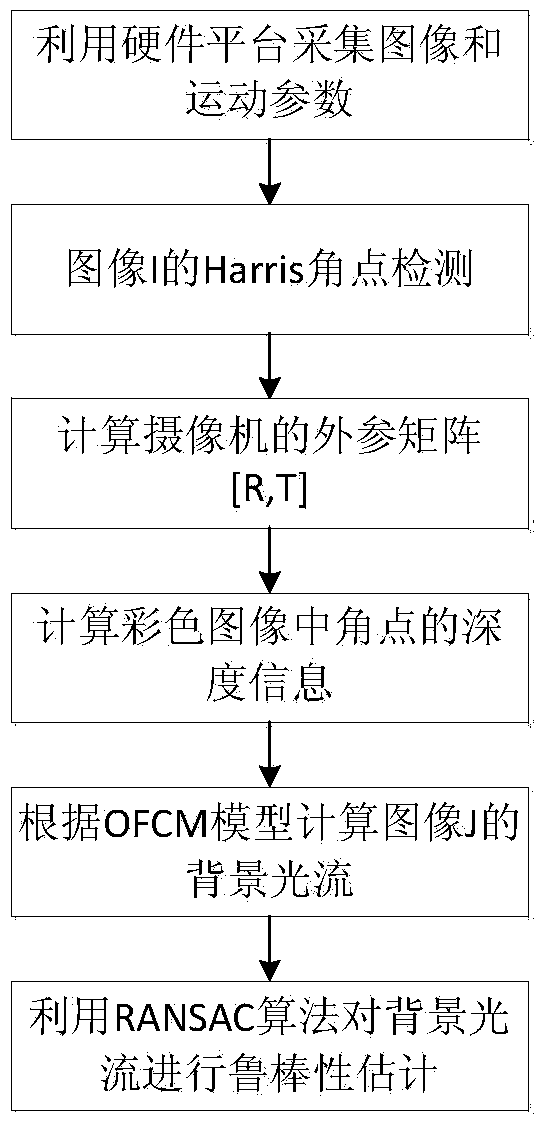
[0058] Such as figure 1 Shown, the present invention is based on the image registration method of inertial sensor and video camera, comprises the following steps
[0059] Step 1. In the hardware platform, synchronously control the camera and the inertial sensor to work, and simultaneously acquire the color images I and J, depth images I’ and J’ of the same scene, and the motion parameters of the camera, that is, the three-axis motion angular velocity [w x ,w y ,w z ] and three-axis motion acceleration [a x , a y , a z ], the specific implementation is as follows:
[0060] The hardware platform of the present invention comprises three parts: control device FPGA, inertial sensor and video camera, inertial sensor comprises gyroscope and accelerometer, video camera comprises depth image acquisition CCD and color image acquisition CCD, is used to take color image I, J and Depth images I', J', the minimum system of FPGA and inertial sensor are all fixed on the depth image acqu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More