

Scanning measurement robot detection method allowing precision to be irrelevant to robot
A technology for measuring robots and detection methods, applied to measuring devices, instruments, optical devices, etc., to achieve the effects of improving automation, high-precision curved surface detection, and improving reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
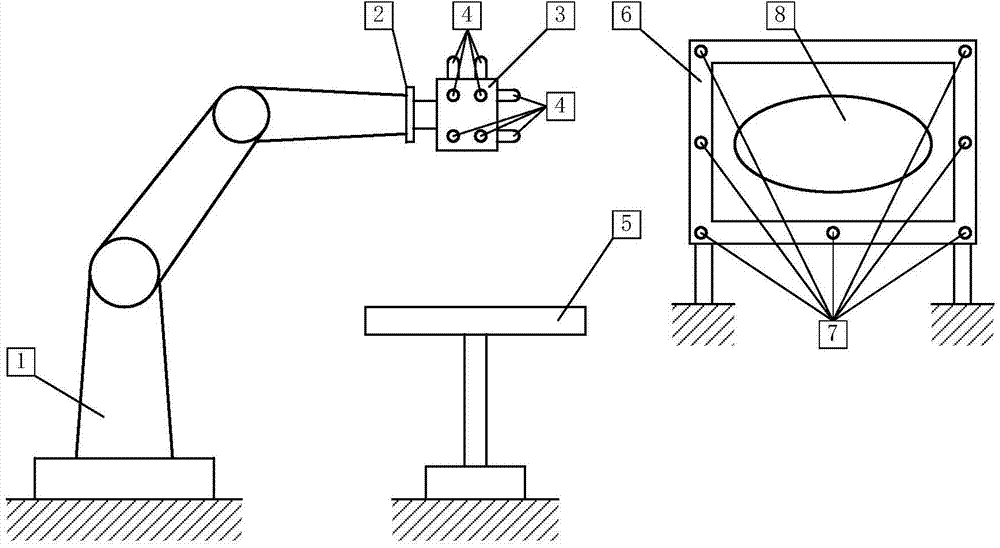
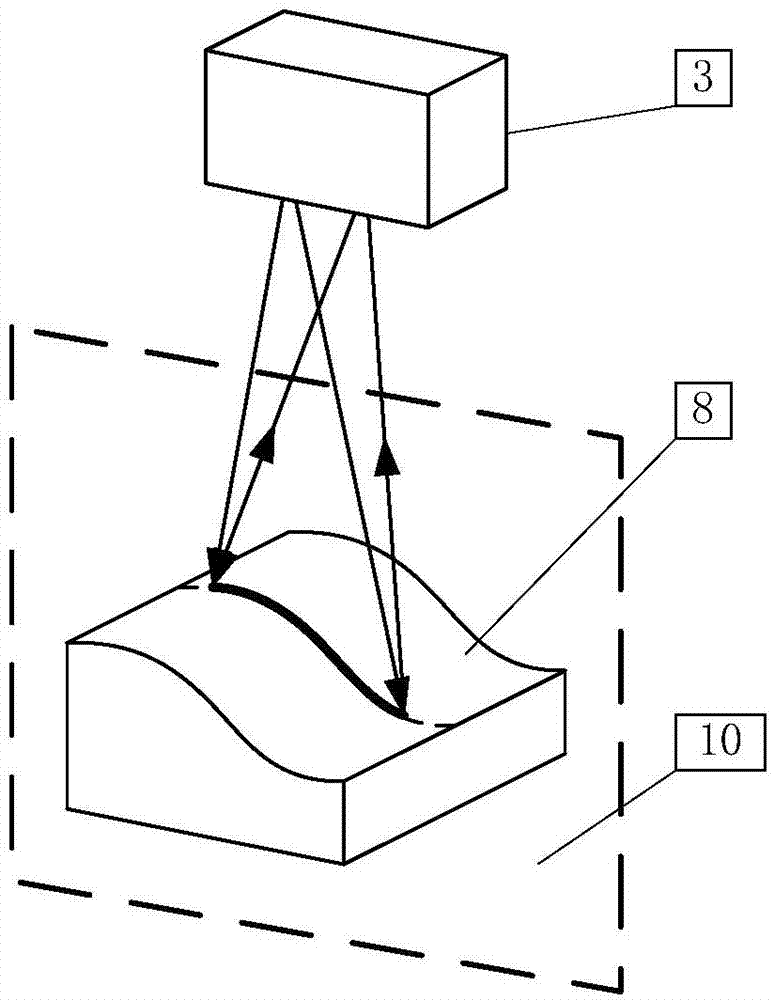
[0039] Such as figure 1 shown. In the present invention, the scanning measurement robot whose accuracy has nothing to do with the robot includes a general industrial robot 1, a flange plate 2, a scanning probe 3, a measurement mark 4 on the scanning probe, an optical tracking system 5, a fixture 6 with a cone socket 7, and The workpiece 8 to be measured, the laser tracker 9 , the light plane 10 of the line scanning probe clamped on the fixture 6 , and the scanning probe 3 are fixed on the robot through the flange 2 .
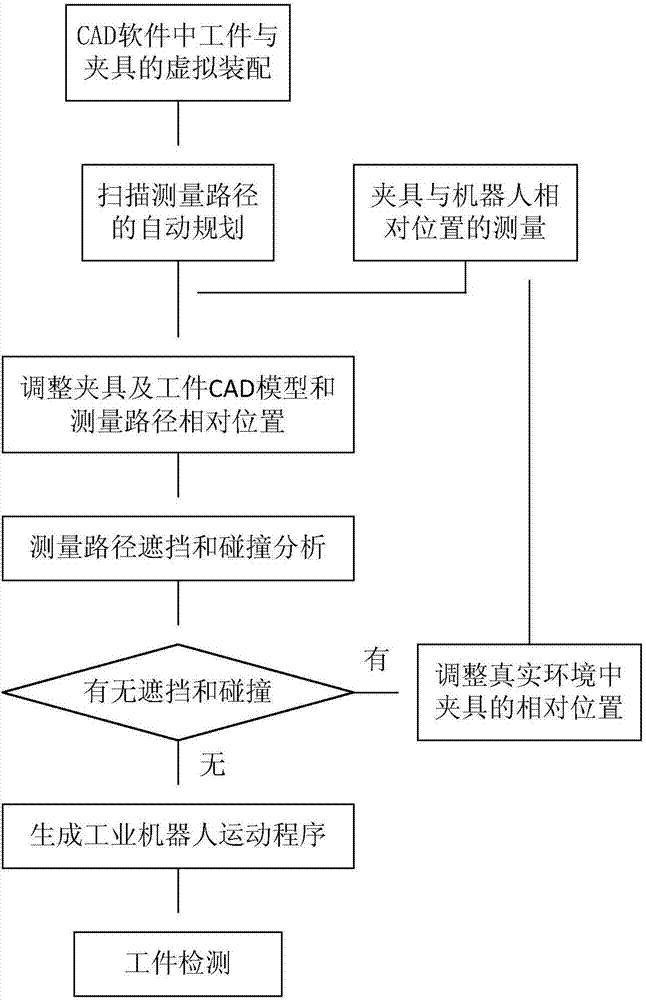
[0040] Flowchart such as figure 2 The application steps of the scanning measurement robot of the present invention shown include:
[0041]S1. Use the virtual assembly method in the CAD software to locate the workpiece CAD model on the special fixture CAD model. In order to use the scanning measurement path based on CAD model planning, the relative positions of the workpiece model and the industrial robot model in the virtual environment must be unified with ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More