

Manipulator with three-dimensional elastic clamping paw
A gripper and manipulator technology, applied in the field of automated manipulators, can solve the problems of high price, complex structure, and short service life of mechanical fingers, and achieve the effects of low friction resistance, stable operation and long service life.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be further described in detail below in conjunction with the accompanying drawings, but does not constitute any limitation to the present invention. Similar component numbers in the accompanying drawings represent similar components. As mentioned above, the present invention provides a claw body for grasping and transferring materials.
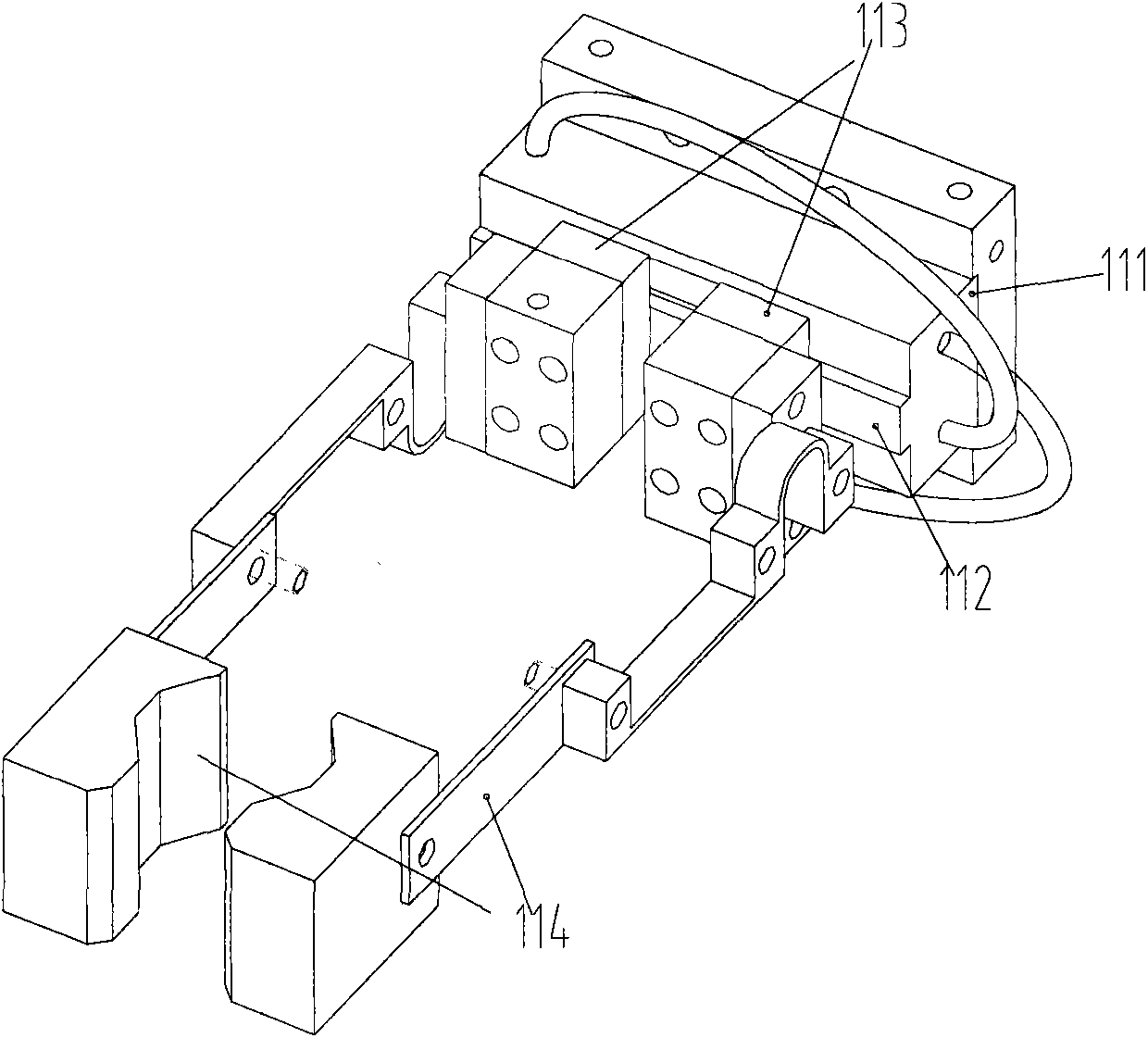
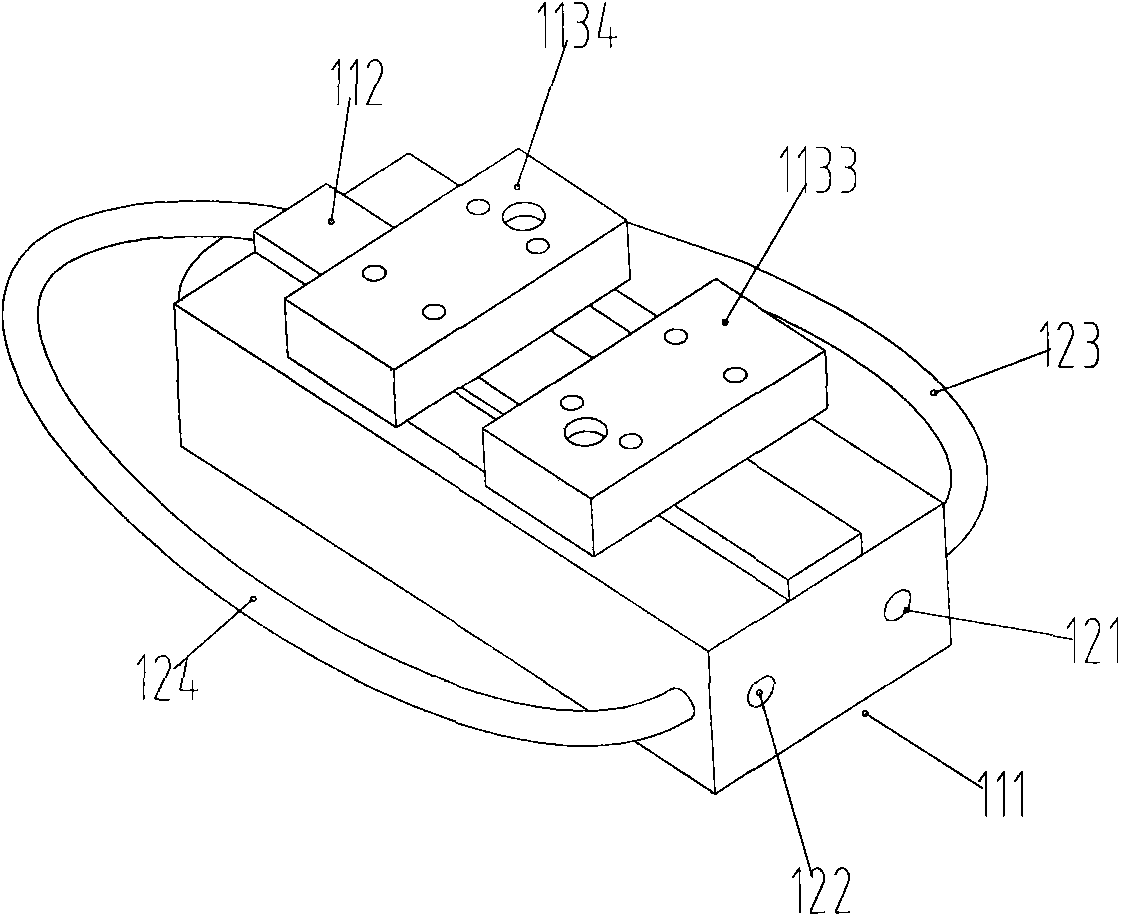
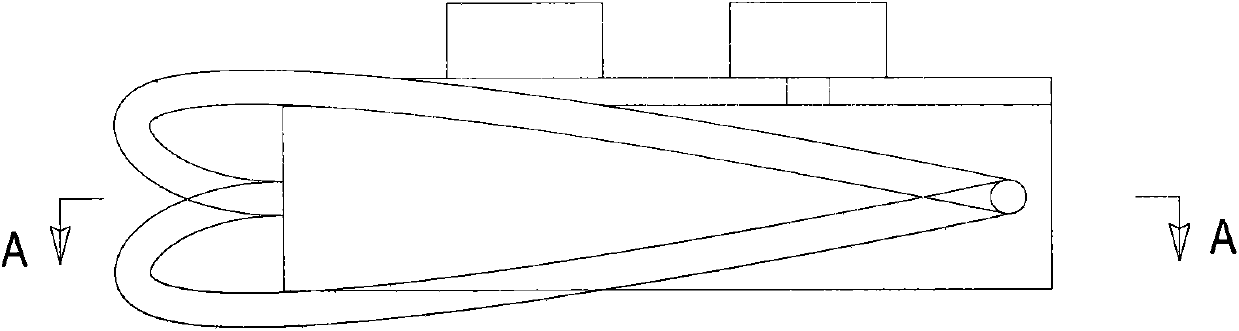
[0032] figure 1 It is a structural schematic diagram of the guide rail type mechanical gripper of the present invention, figure 2 , image 3 , Figure 4 It is a structural schematic diagram of the claw body of the guide rail type mechanical claw of the present invention, Figure 5 yes image 3 The schematic diagram of the structure of the claw body at A of the shown guide rail type mechanical gripper of the present invention, Image 6 yes Figure 4 A schematic structural view of the section of the gripper body of the guide rail type mechanical gripper of the present invention at B, Figure 7 It is a st...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More