

Mammary gland intervening robot compatible with nuclear magnetic resonance
A technology of nuclear magnetic resonance and robotics, applied in sensors, medical science, diagnostic recording/measurement, etc., to achieve the effect of reducing work intensity and facilitating control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The specific structure and implementation mode of the present invention will be further described below in conjunction with the accompanying drawings.
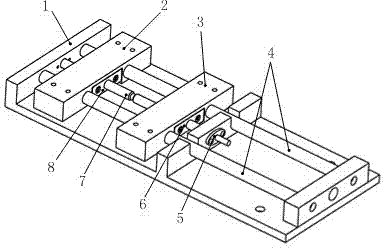
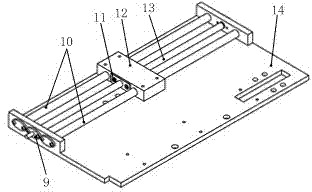
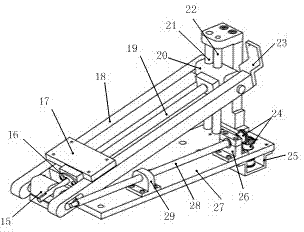
[0041] The structural composition of the present invention is as figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Image 6 , Figure 7 , Figure 8 , Figure 9shown. A breast interventional robot compatible with MRI includes a positioning module, a puncture module, a breast stabilization module, a biopsy module, a storage module (68), a driving module, and a prone support (58). The positioning module is composed of an X-direction slide table (67), a Y-direction slide table (64), and a Z-direction slide table (65). The X-direction slide (67) is located at the bottom of the positioning module, including the X-direction slide base (1), the X-direction screw (7), the X-direction rail (4), the X-direction nut (8), and the X-direction right Screw nut (6), X forward slide block (2), X backward slide block (3)...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More