

Novel full-symmetric spherical robot
A spherical robot, fully symmetrical technology, applied in the direction of motor vehicles, transportation and packaging, etc., can solve the problems of poor controllability, poor stability, and high cost of robots, and achieve easy dynamic analysis, good stability, and good appearance. beautiful effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
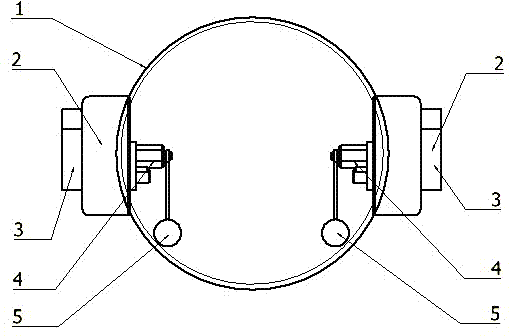
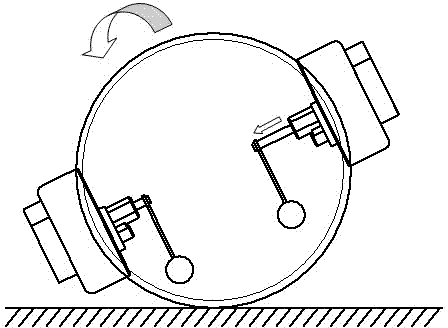
[0023] See Figure 1~Figure 3 , The new fully symmetrical spherical robot includes an external rigid spherical shell (1), two supporting discs (2), two servo motors (3), two linear motors (4) and two counterweight swing arms ( 5), characterized in that: the outer rigid spherical shell (1) is open at both ends, and is fixedly connected to the two supporting discs (2) by a set screw; the two servo motors (3) and the two linear motors (4) The two supporting discs (2) are symmetrically installed in the direction of the maximum diameter of the spherical shell (1); the two counterweight swing arms (5) are respectively fixedly connected with the output shaft of the linear motor (4) through Two linear motors (4) change the positions of the two counterweight swing arms (5); the two linear motors (4) are respectively connected with two servo motors (3) and driven by two servo motors (3) The two linear motors (4) rotate and simultaneously drive the counterweight swing arm (5) to rotate t...
Embodiment 2
[0025] This embodiment is basically the same as the first embodiment, and the special features are as follows: The outer rigid spherical shell (1) is made of a transparent material, which is beneficial to observe the internal structure and has a beautiful appearance. At the same time, the outer rigid spherical shell (1) is open at both ends, and is fixedly connected with the two supporting discs (2) through the set screws.
Embodiment 3
[0027] This embodiment is basically the same as the first embodiment, and the special features are as follows:
[0028] The counterweight swing arm (5) is respectively assembled on the output shafts of the two linear motors (4) through matching nuts, and the position of the counterweight swing arm (5) is changed by the linear motor (4) to realize the steering movement of the robot.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More