Low-precision inertial navigation initial alignment method based on quaternion CKF
An initial alignment, low-precision technology, applied to measuring devices, instruments, etc., can solve problems such as divergence, filter numerical instability, and high-order term truncation errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be further described below in conjunction with accompanying drawing:
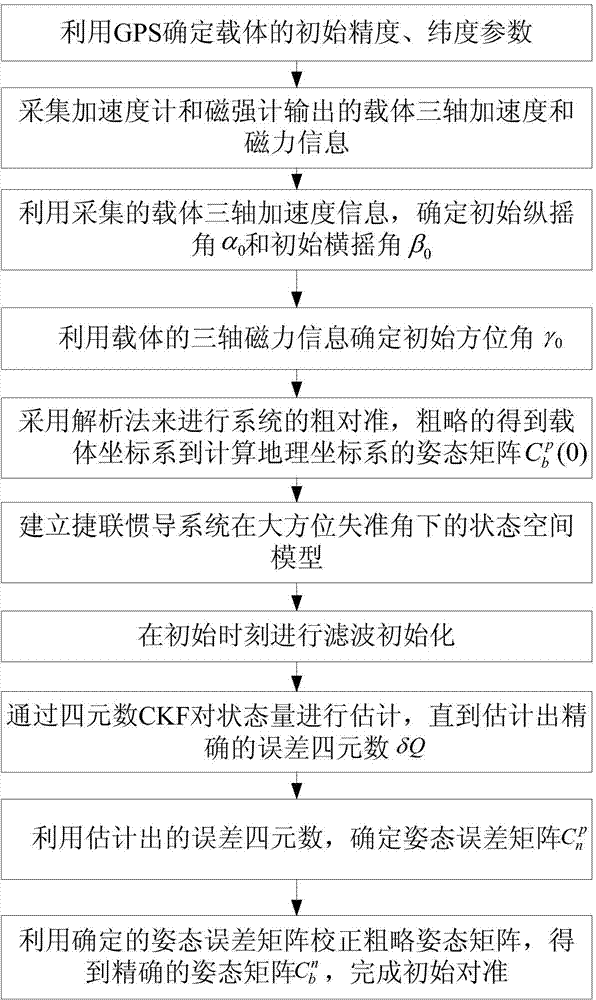
[0042] Such as figure 1 Shown: the present invention comprises the following steps:
[0043](1) Use GPS to determine the initial accuracy and latitude parameters of the carrier;
[0044] (2) Collect the carrier triaxial acceleration and magnetic force information output by the accelerometer and the magnetometer;
[0045] (3) Using the collected three-axis acceleration information of the carrier, determine the initial pitch angle α according to the following formula 0 and the initial roll angle β 0 ;
[0046] α 0 = arcsin ( f x b g ) ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More