

Method of six-DOF industrial robot passing singular region
An industrial robot and degree of freedom technology, which is applied in the direction of manipulators, manufacturing tools, program-controlled manipulators, etc., can solve problems such as sudden changes in joint angular velocity and unstable operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
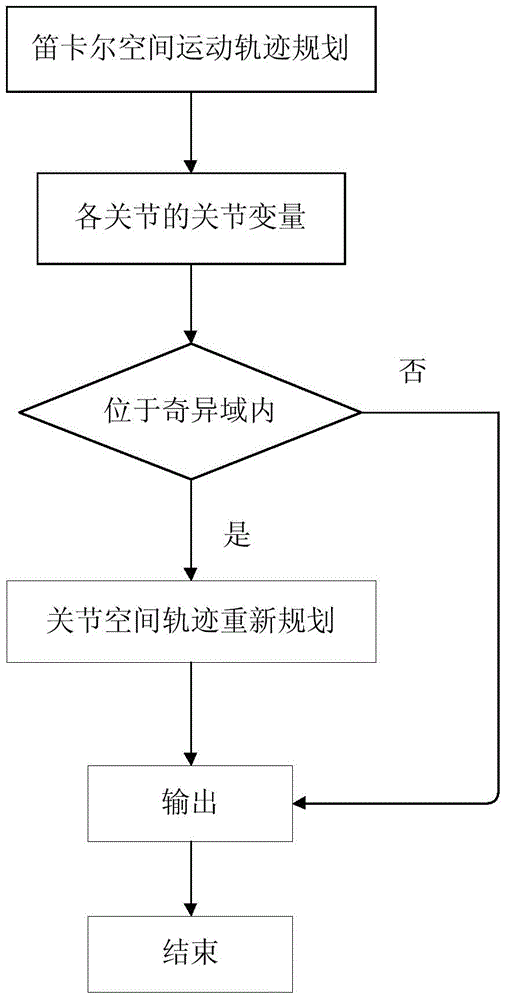
[0086] like figure 1 As shown, in the offline simulation software, the motion trajectory planning of the industrial robot in Cartesian space is carried out, and the coordinate value of each point in the motion path and the angular displacement, angular velocity and angular acceleration of each joint of the robot at each point are obtained. Calculate the obtained joint variables and judge whether the robot is in the singular domain. If the path of the robot does not pass through the singular domain, it can be directly output. Re-planning, constructing a linear transition function with parabola fitting to realize the smooth transition of the angular displacement and angular velocity of each joint, so as to achieve the purpose of the robot passing through the singular domain smoothly. (When the position and attitude of the robot are measured on mutually orthogonal axes in space, that is, when measured in a Cartesian coordinate system, this space is called Cartesian space. For a s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More