

Sucking-type underwater manipulator and sucking method thereof
A technology for underwater manipulators and manipulators, applied in manipulators, underwater operating equipment, chucks, etc., can solve problems such as poor working stability, achieve the effects of ensuring firmness, firm grasping of objects, and simple design principles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention can be realized through the following technical solutions, which are described as follows in conjunction with the accompanying drawings:
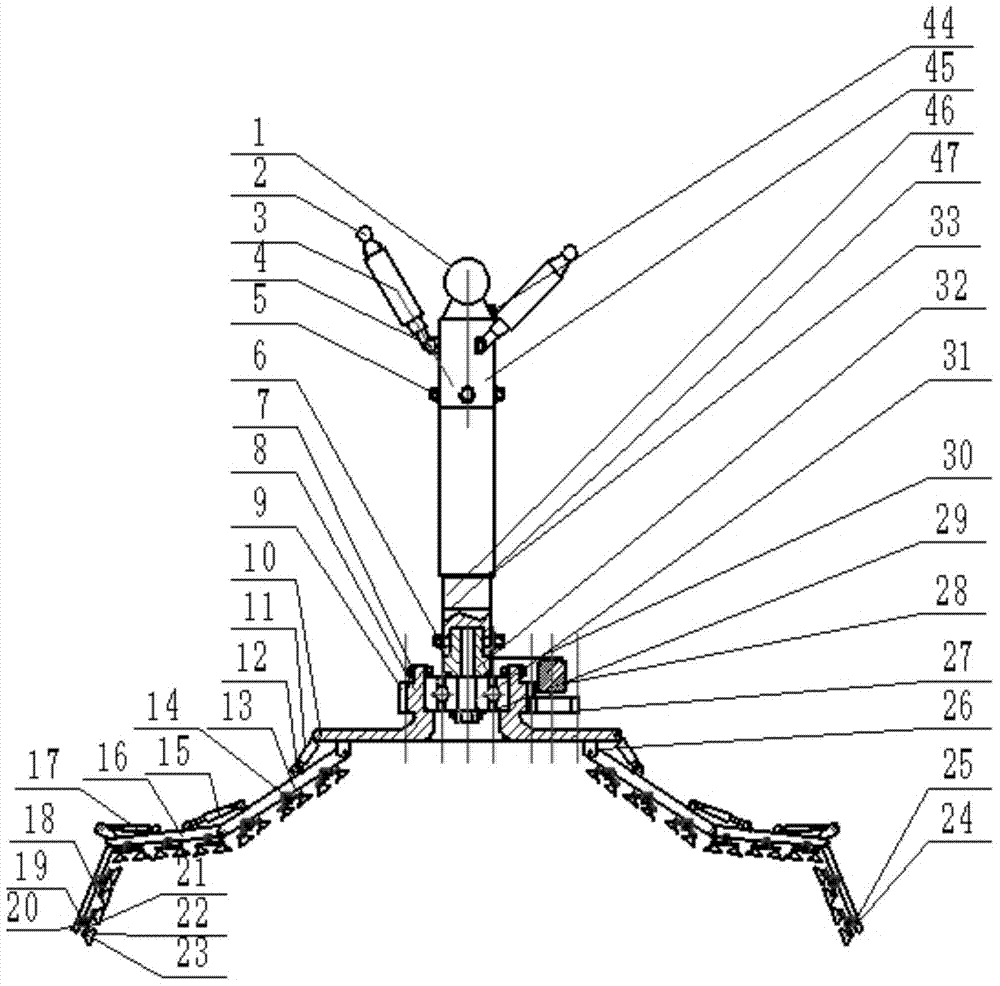
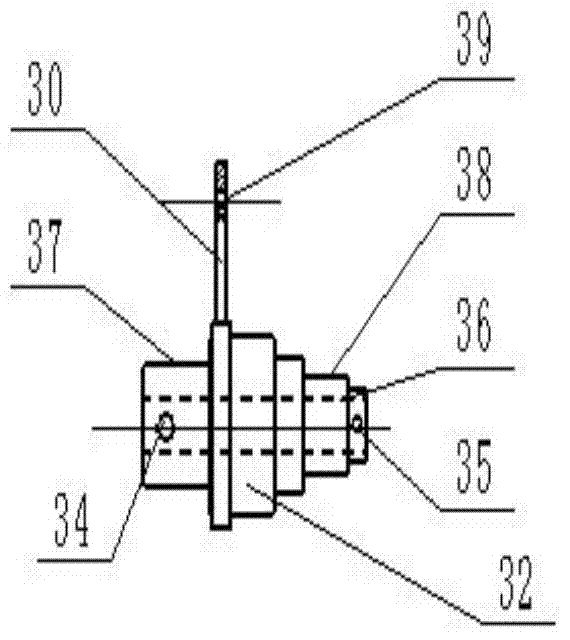
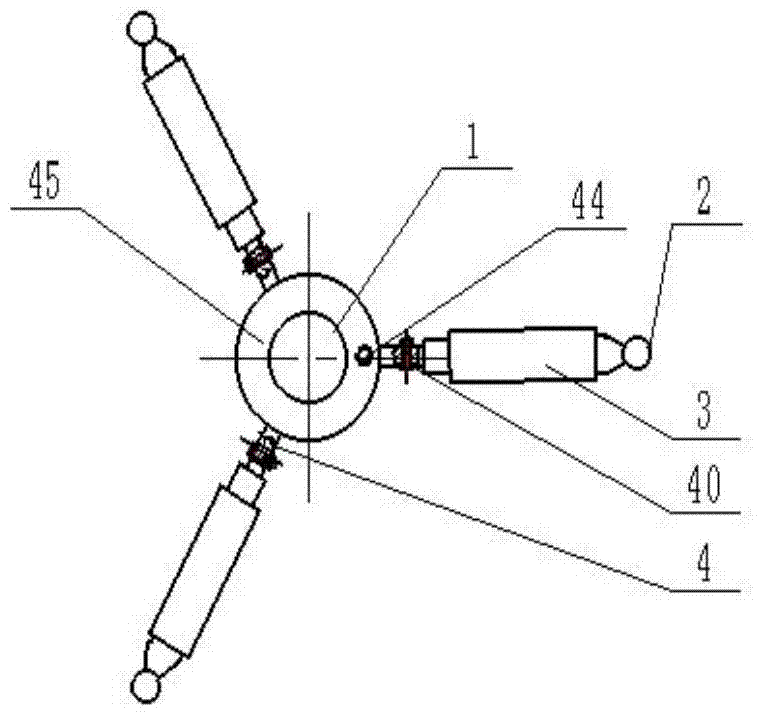
[0032] Such as figure 1Shown: a new type of underwater suction manipulator device consists of a manipulator base 45, a single-stage hydraulic cylinder 33, a mechanical glove shaft 32, a hydraulic motor 28, a sealed bearing 31, hydraulic cylinders at all levels, a manipulator base 8, and machinery at all levels. Wrist, suction cup bar group 20 form. Device connection mode: the universal ball 1 on the top of the base 45 of the mechanical arm is connected to the universal ball seat of the hull; the first-level hydraulic cylinder 3 with the universal ball structure 2 on the three bases is connected to the first-level hydraulic cylinder seat 4 and the universal ball seat of the hull. On the ball seat; the single-stage hydraulic cylinder 33 with positioning slot is connected with the mechanical arm base 45 through th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More