

Autonomously navigating water surface cleaning robot
A cleaning robot and autonomous navigation technology, applied in the field of cleaning ships, can solve the problems of high production cost, large size, and insufficient flexibility, and achieve the effects of reducing labor intensity, ensuring personal safety, and reducing labor costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
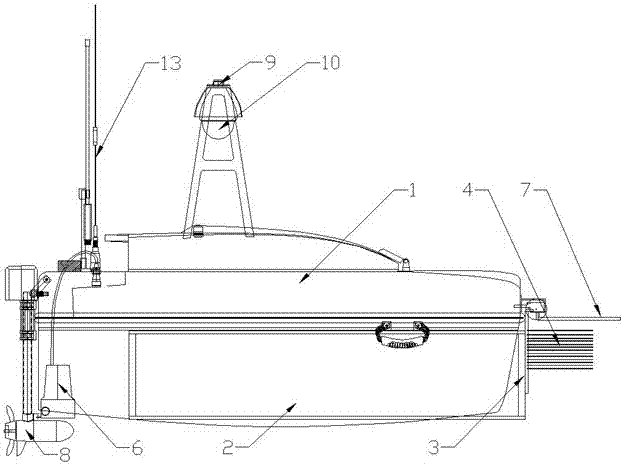
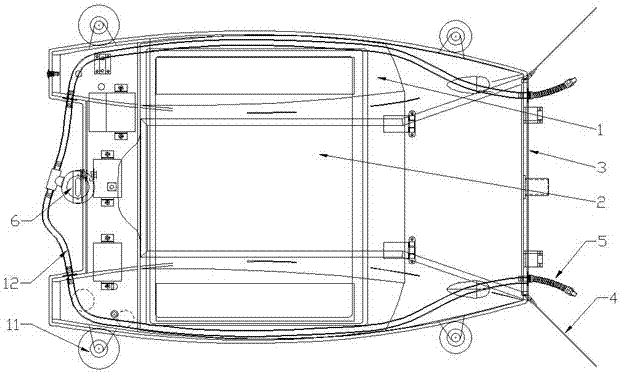
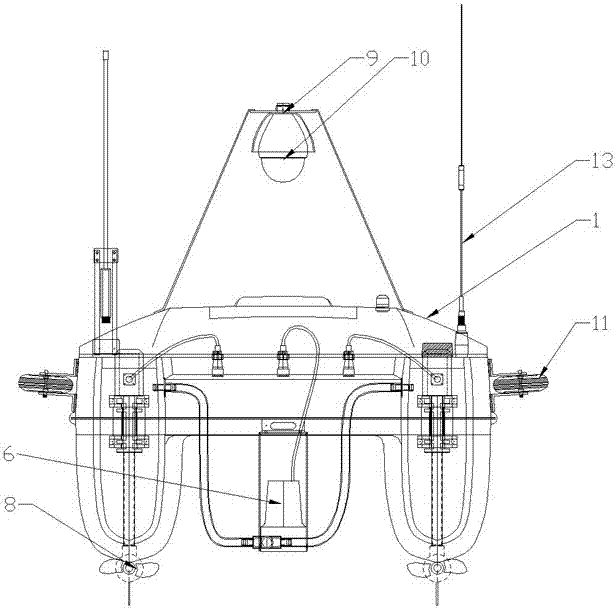
[0020] Such as Figures 1 to 3 As shown, in this embodiment, the present invention includes a hull 1 on which a control device and a driving device are arranged. The control device includes a video acquisition device, a navigation device, a central processing unit and a communication module, and the driving device, the video acquisition device, the navigation device and the communication module are all connected to the central processing unit, and the The hull 1 is also provided with a garbage collection device, the garbage collection device includes a garbage collection frame 2 arranged at the bottom of the hull 1, the collection port 3 of the garbage collection frame 2 is located in the forward direction of the hull 1, The base station installed on the ground communicates with the central processing unit wirelessly, the central processing unit sends the video information collected by the video acquisition device to the base station, and the operator sends the video informati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More