

Online modeling method of flying robot dynamics model
A technology of flying robots and dynamic models, which is applied in the direction of instruments, simulators, control/regulation systems, etc., and can solve problems such as the inability to realize the parameter correction of the online modeling system of flying robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] Specific embodiments of the present invention will be described below in conjunction with the accompanying drawings.
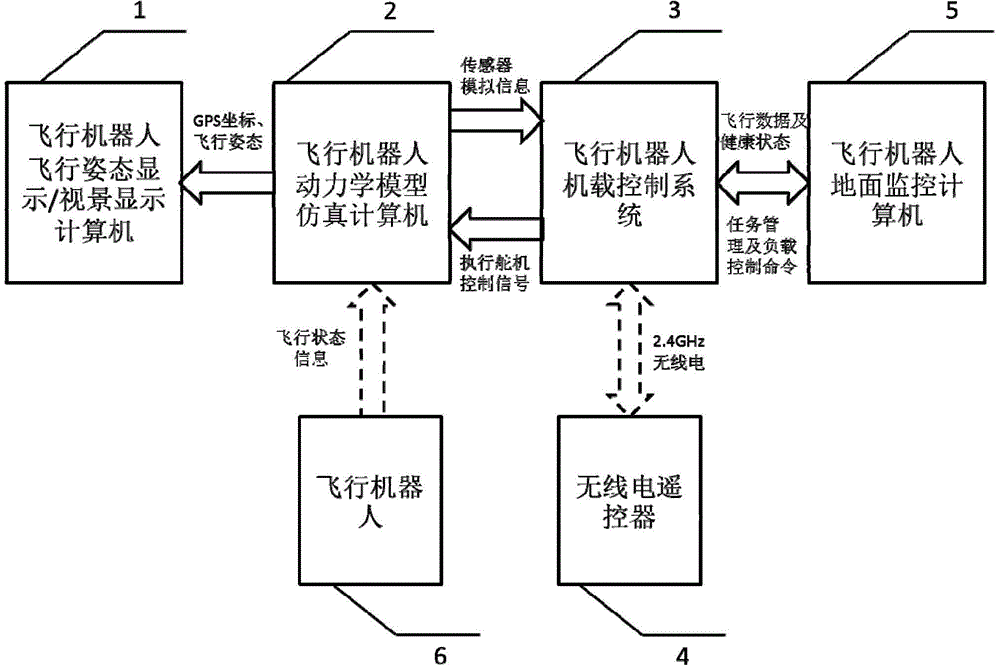
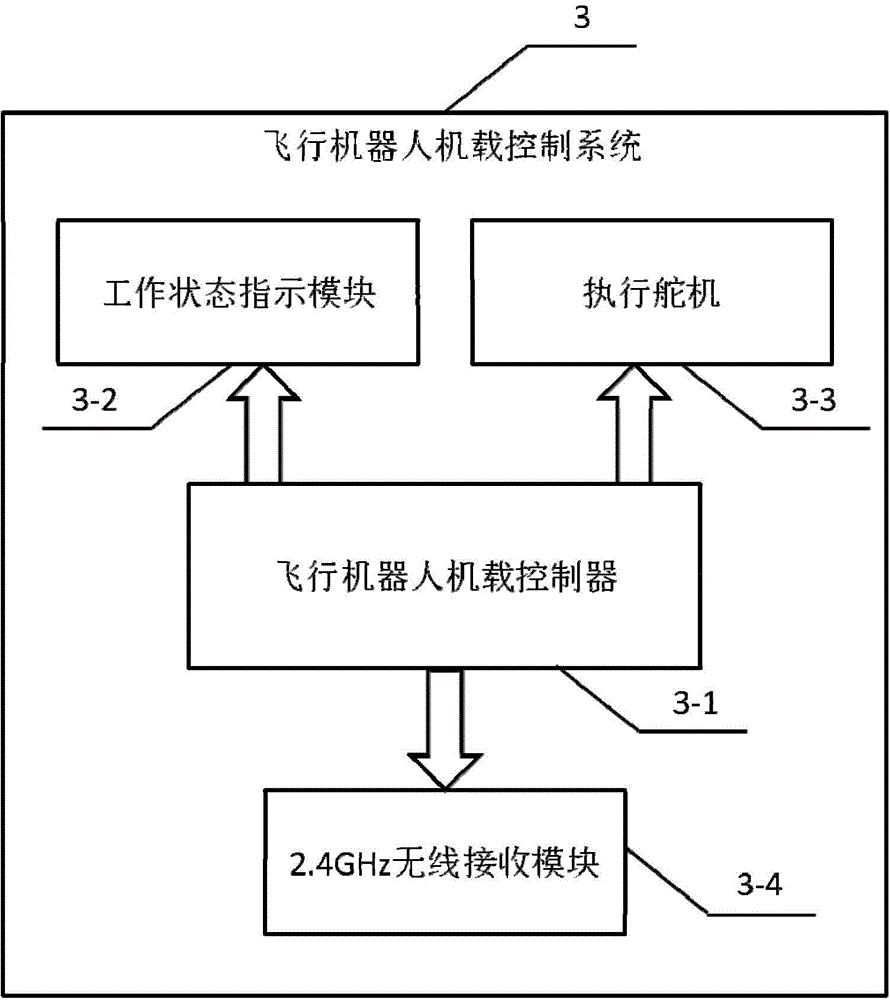
[0039] By simulating the accelerometer, gyroscope and other sensor information and forming a data packet to send to the flight robot on-board controller 3-1, after the control algorithm generates the control amount to realize the function and complete the flight task, form a data packet and send it to the flying robot power learning model to generate corresponding control effects, and use the flying robot flight attitude display / view display computer 1 to realize the three-dimensional display of the flying robot and its flying environment, and then complete the control algorithm design and policy verification of the flying robot flight control system; at the same time The execution steering gear 3-3 of the flying robot can be connected with the onboard controller 3-1 of the flying robot, so as to visually verify the correctness of the control signal gene...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More