Fuel optimal pose coordination method suitable for space tether robot in target approaching process
A technology of space tethering and coordination methods, applied in the direction of attitude control, etc., can solve problems such as tether winding and terminal robot attitude instability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
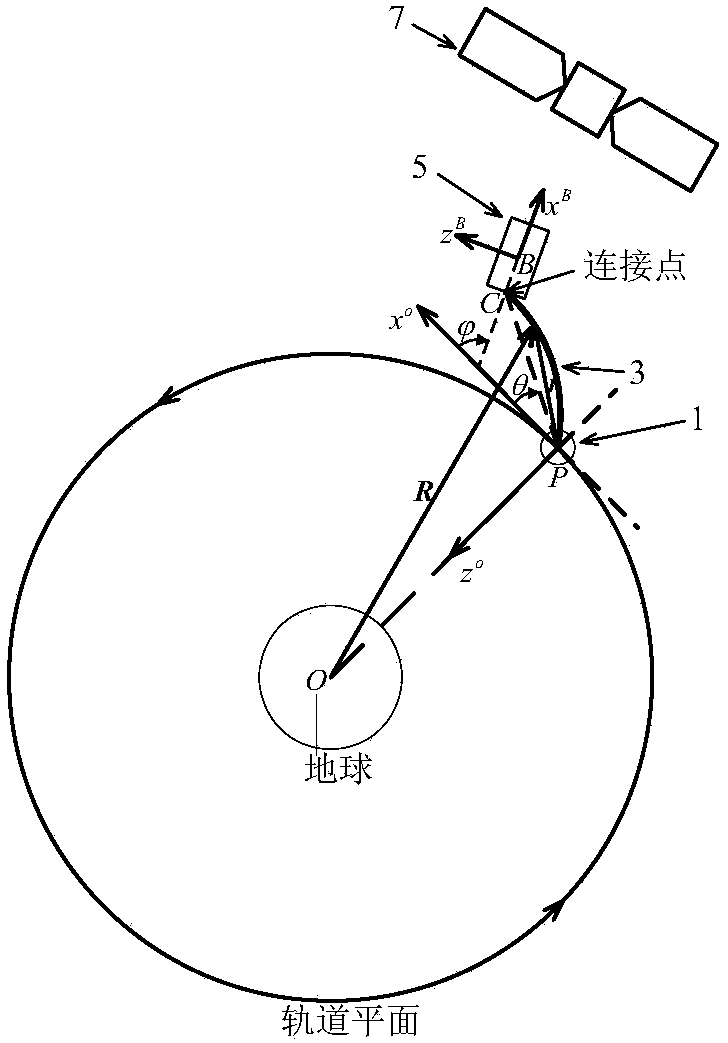
[0219] (1) Establishment of pose coupling dynamic model
[0220] The dynamic model of the system can be established by using the Hamilton principle as follows:
[0221]
[0222] In the formula, μ=0.0045kg / m, L=300m, m B =10kg,J B =1kg·m 2 ;F B and M B Respectively represent the control force and control torque acting on the end operating mechanism; A B Indicates the maneuvering acceleration of the terminal operating mechanism, which satisfies:
[0223] A B = x · · B - 2 ω z · B z ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More