

Boundary feature point registering method for point cloud splicing in three-dimensional scanning system
A technology of 3D scanning and point cloud stitching, which is applied in image data processing, measuring devices, instruments, etc., and can solve problems such as registration falling into local optimum
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
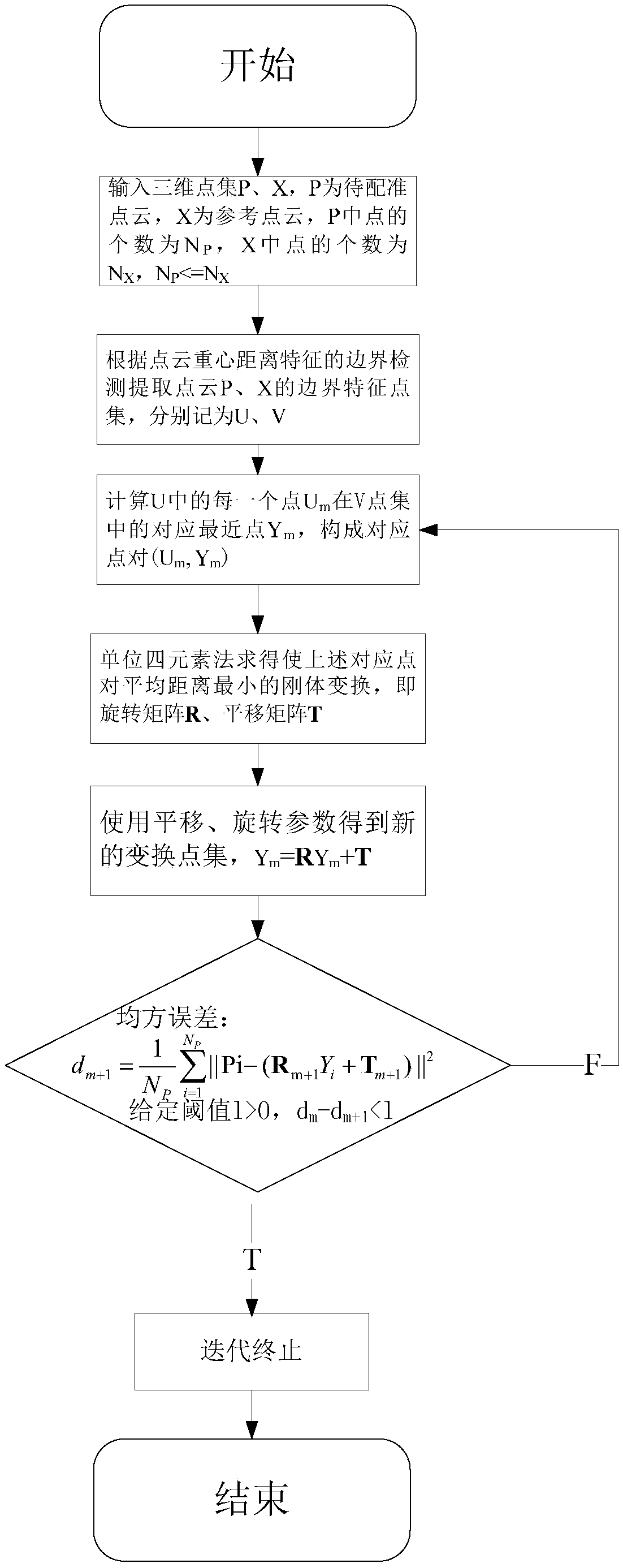
[0051] A boundary feature point registration method for point cloud splicing in a three-dimensional scanning system, the method comprising the following steps:
[0052] (1), use a three-dimensional scanner to scan the outline of the physical model from different perspectives, and obtain multi-view three-dimensional sampling point data;
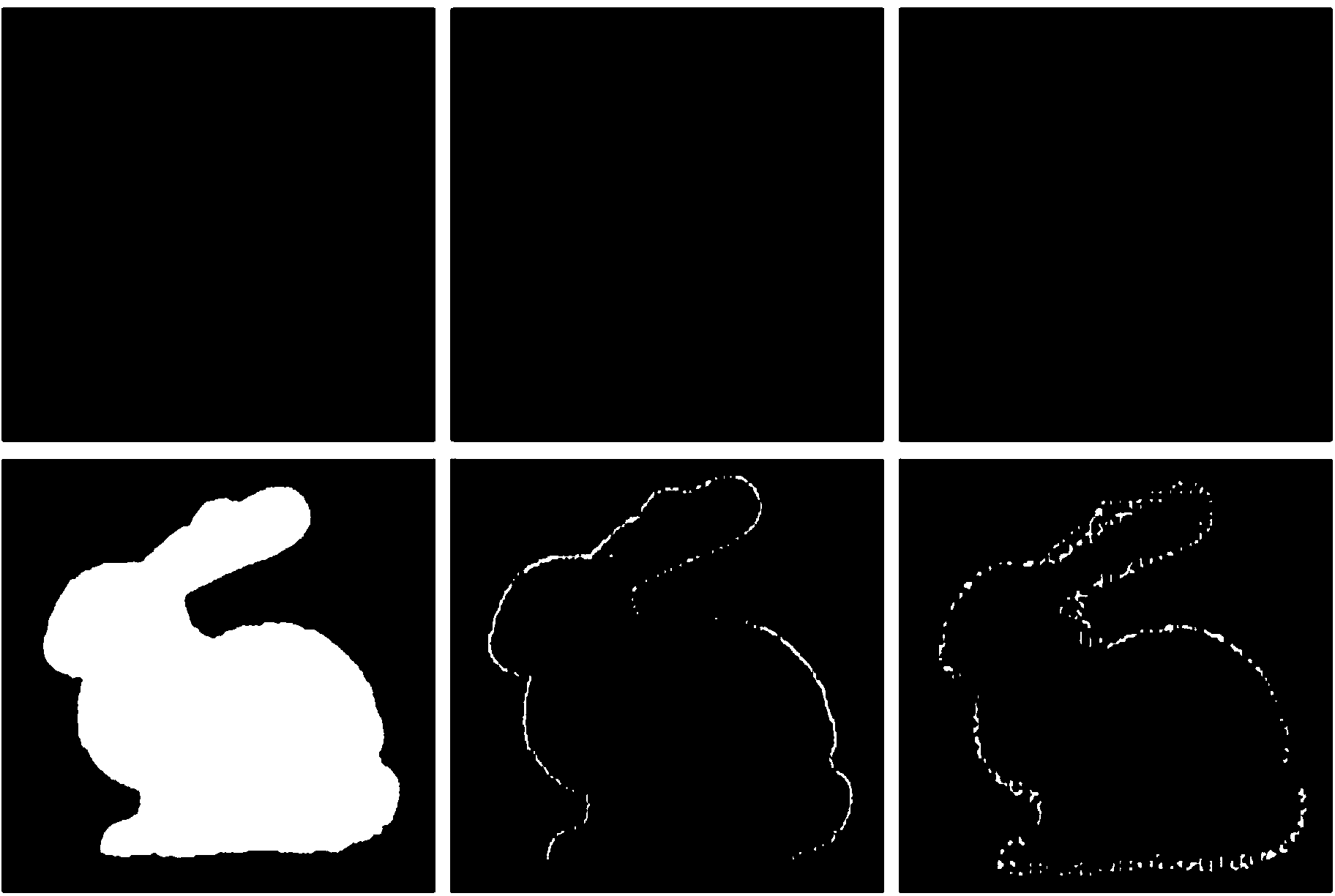
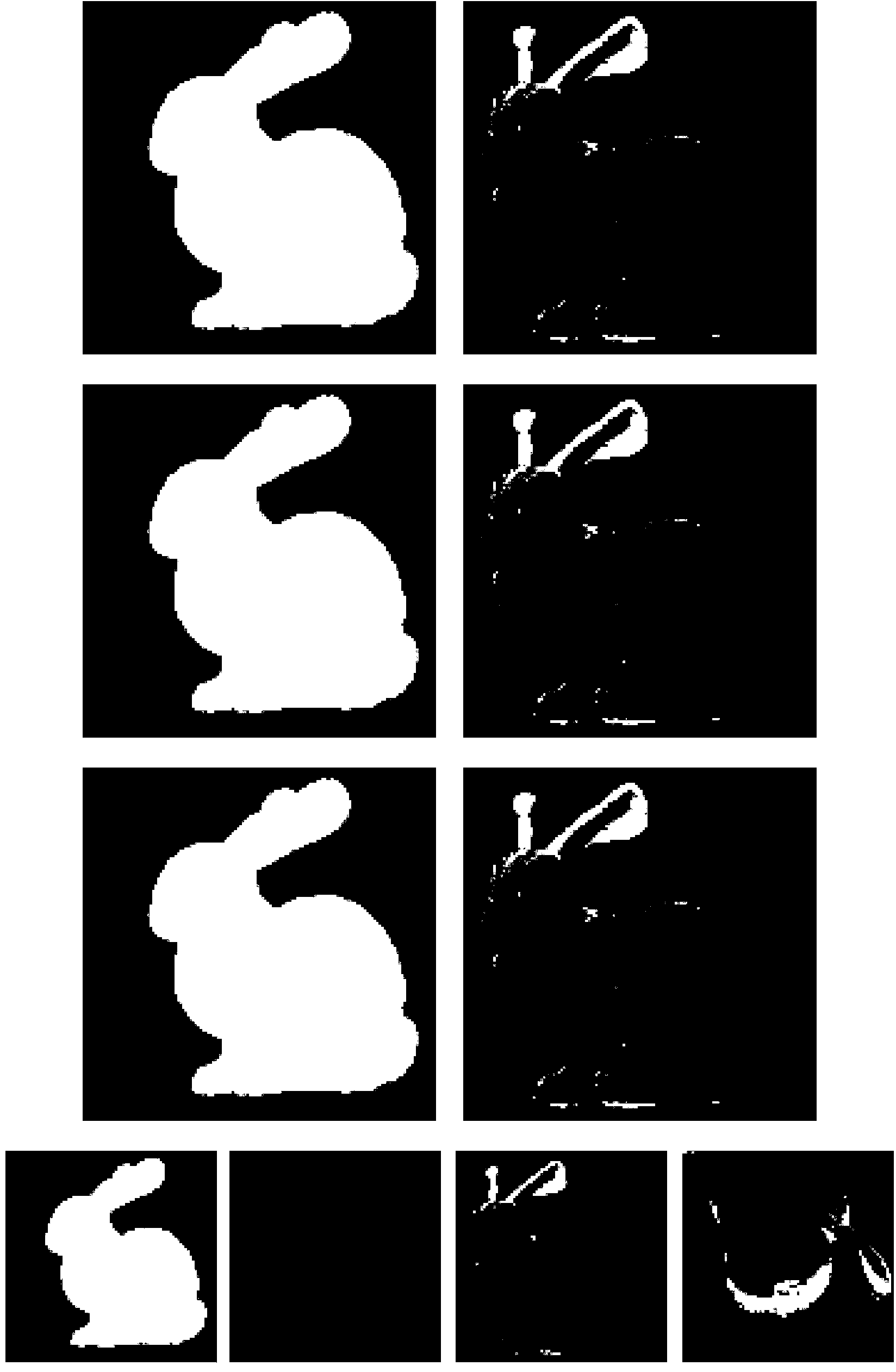
[0053] (2), for the two pieces of three-dimensional sampling point data of the same physical model under different viewing angles, the boundary feature points of the two pieces of three-dimensional sampling point data are respectively extracted by using the boundary detection method of the center of gravity distance feature of the point cloud;
[0054] (3) Among the two extracted boundary feature points, fix one of them as the reference point set and the other as the target point set, use the K-D tree...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More