Absolute positioning error correction method of in-series joint type robot and calibration system
A technology of absolute positioning and error calibration, which is applied in the field of absolute positioning error calibration method and calibration system of tandem articulated robots. The effect of precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be described below in conjunction with the accompanying drawings.
[0034] In the following description, some specific details are provided to provide those skilled in the computer arts with a general understanding of the present invention. In the embodiments, elements for realizing specific functions are shown in the form of schematic diagrams or block diagrams, so as to highlight technical points without obscuring the present invention in unnecessary details. For example, since those of ordinary skill in the art can understand the details disclosed in this field about network communication, electromagnetic signal command technology, user interface or input / output technology, etc., the maximum degree of The above technical details are omitted above, and these details are not considered to be the necessary features to obtain the complete technical solution of the present invention.
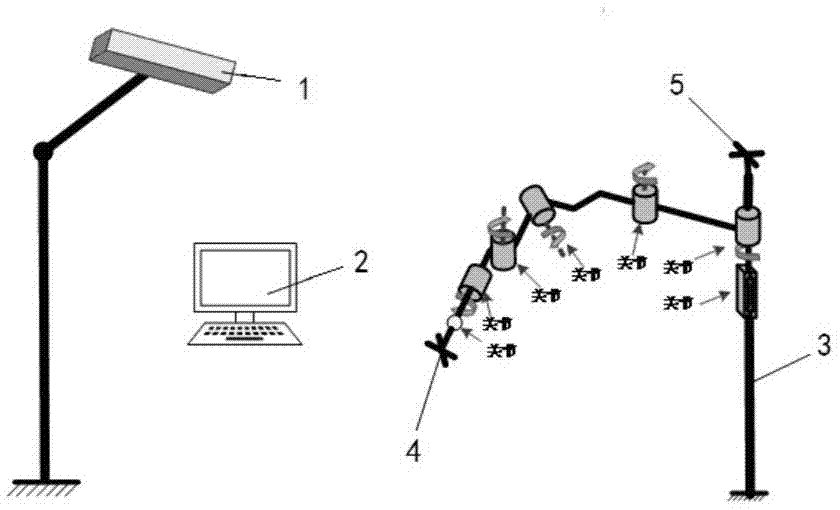
[0035] Such as figure 1 As shown, the calibration system o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More