

Matlab simulation visualization platform for vehicle bug obstacle avoidance algorithm
An algorithm and vehicle technology, applied in the field of computer simulation, can solve problems such as complex implementation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The present invention will be further described below in conjunction with specific examples.
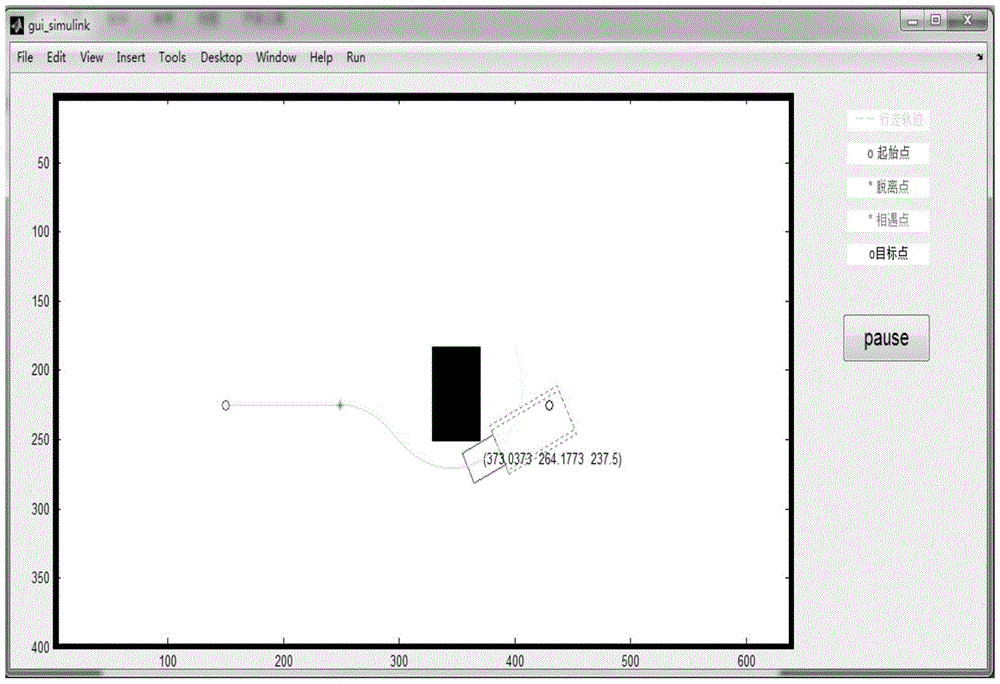
[0059] The Matlab simulation visualization platform of the vehicle Bug obstacle avoidance algorithm described in this embodiment is to utilize MATLAB software to create the vehicle obstacle avoidance simulation visualization platform under the combination of Simulink simulation technology and GUI interface design, as Figure 10 and Figure 11 As shown, the animation simulation of the obstacle avoidance algorithm can be carried out. It includes:
[0060] 1) The environment map generation part is used to generate a map for simulation;
[0061] 2) Simulink algorithm simulation implementation part, the algorithm implementation depends on the Simulink cycle operation mode, use the Simulink cycle mechanism to realize the internal cycle of the algorithm and stop the trigger condition, use the custom module MatlabFunction of Simulink to write code, realize the function of the algori...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More