

Self-adaptive indoor vision positioning method based on global motion estimation
A global motion and visual positioning technology, applied in the field of image processing, can solve the problems of difficult positioning, large amount of calculation, slow parameter estimation speed, etc., and achieve the effect of improving effectiveness, improving positioning accuracy, and shortening execution time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0036] The wired camera used in the experiment has a pixel size of 640×480, a resolution of 96dpi, and a video frame rate of 30fps.
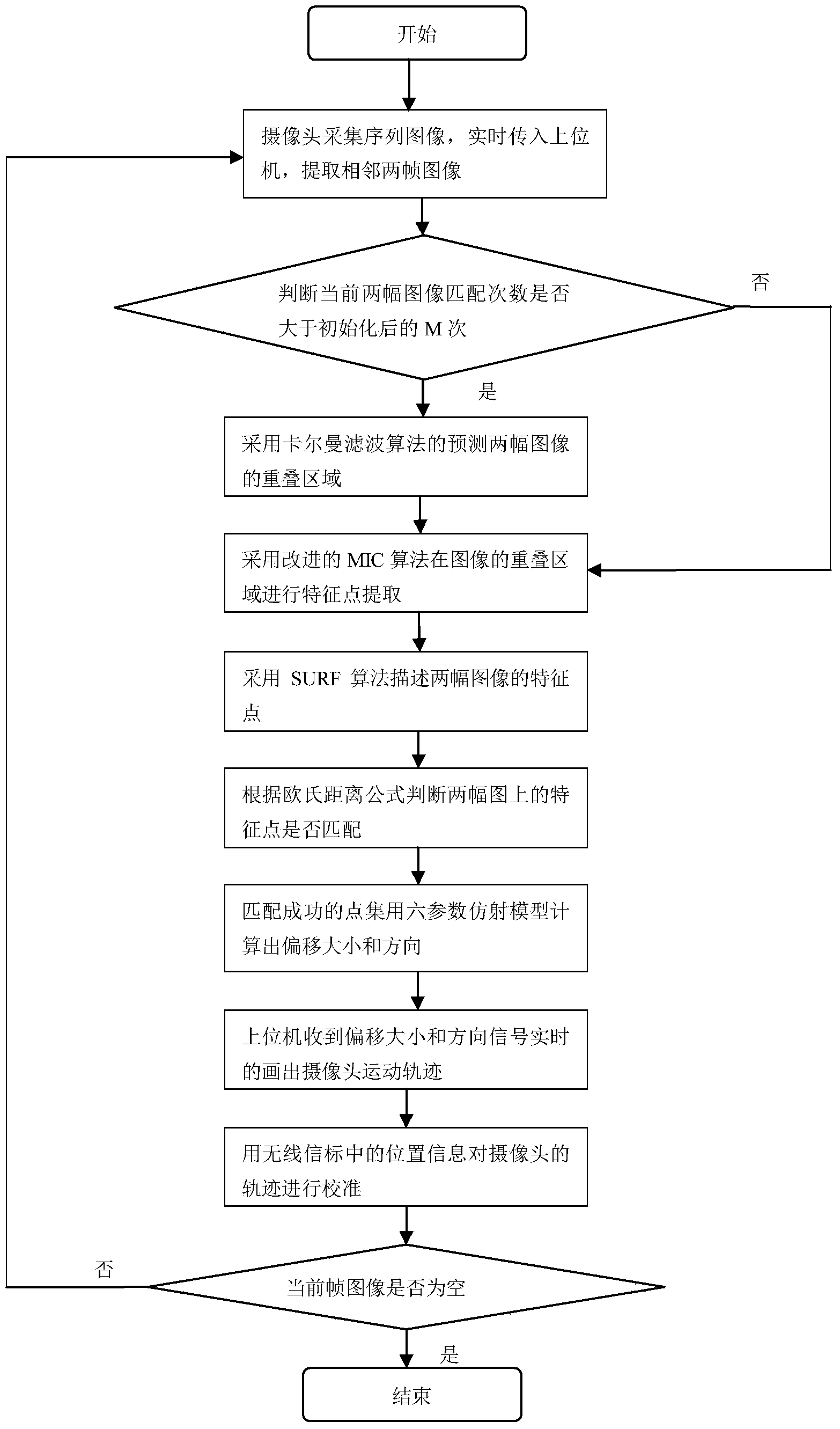
[0037] The flowchart of the method of the present invention is as figure 1 , the specific implementation process is as follows:
[0038] (1) The camera collects ground image information, and extracts two images from the zeroth frame image of the sequence, the zeroth frame is the reference frame, and the other image is the current frame. The image is preprocessed by adaptive smoothing filter, and then the color image is converted into a grayscale image.
[0039] (2) Before the Kalman filtering algorithm can accurately predict the overlapping area, M matchings are required. If the number of times the two images are successfully matched is less than M times, perform step 3 on the original image; if it is more than M time...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More