Multi-view dense point cloud data fusion method based on two-sided filter
A bilateral filter and dense point cloud technology, applied in image data processing, electrical digital data processing, special data processing applications, etc., can solve problems such as inability to guarantee point clouds and low efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
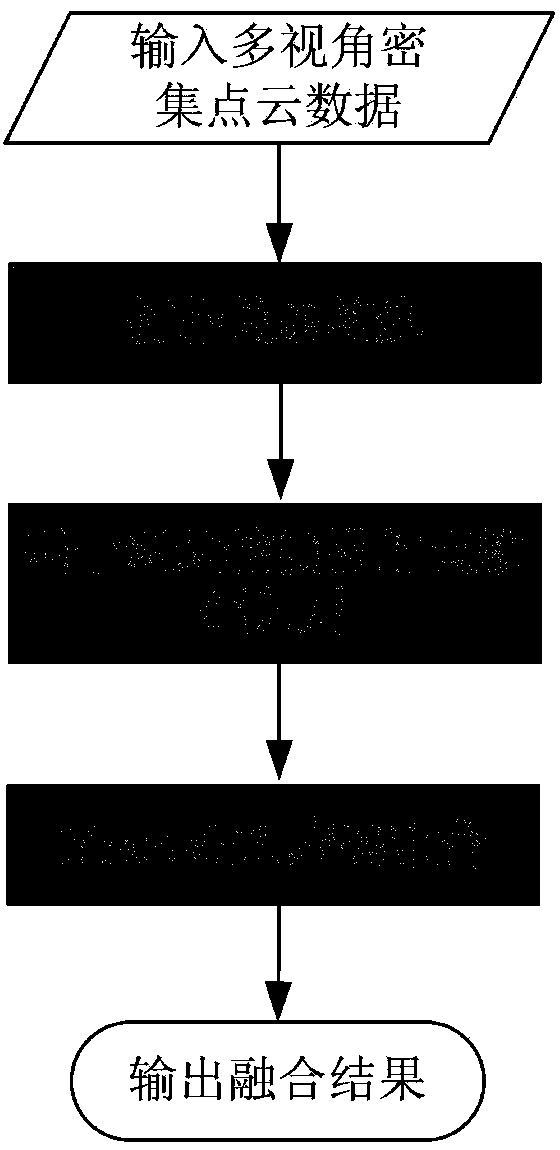
[0060] The present invention proposes a multi-view dense point cloud data fusion method, such as figure 1 shown. When fusing multiple pieces of multi-view dense point cloud data, the first step is to input multi-view dense point cloud data. The input multi-view dense point cloud data is required to contain both 3D coordinate information and normal vector information. That is to say, each point data in the input multi-view dense point cloud p=(v,n), where v=(v x ,v y ,v z ) represents a three-dimensional coordinate vector, n=(n x ,n y ,n z ) represents a normal vector.
[0061] After inputting the multi-view dense point cloud data, before proceeding to the second step of topological relationship construction, it is necessary to calculate the average point distance D of the multi-view dense point cloud data for later use. The calculation method of the average point distance D of multi-view dense point cloud data is as follows:
[0062] 1) Randomly select a piece of poin...
Embodiment 2
[0092] Below in conjunction with concrete simulation experiment, the present invention is described, and wherein the present invention method realizes corresponding algorithm on VS2010 and opengl platform and runs on the PC of Intel i7-4770CPU 3.4GHz, 16GB internal memory.
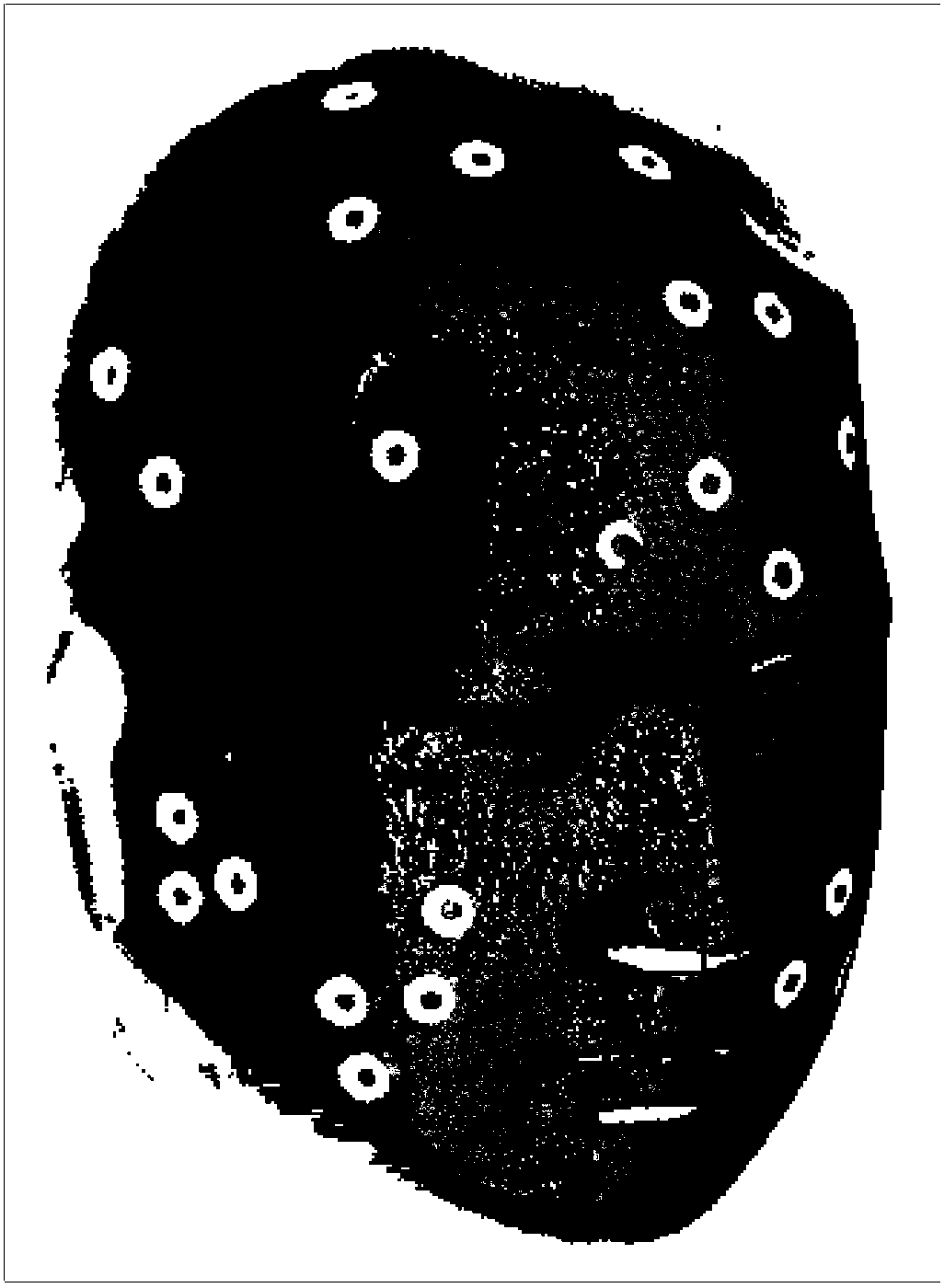
[0093] Figure 3(a) shows the head point cloud data with overlapping parts of the three viewing angles, which contains a total of 657,088 3D point data. In order to show the overlapping area more clearly, Fig. 3(b) is an enlarged view of the part circled in the box in Fig. 3(a). Figure 3(c) is the fused point cloud data, which contains a total of 306803 point data. Fig. 3(d) is an enlarged view of the part in the box circle in Fig. 3(c) (corresponding to Fig. 3(b), in order to show more clearly the effect of fusion of the overlapped area). This example can also illustrate that the method of the present invention can quickly fuse multi-viewpoint dense point cloud data into a complete, single-layer, smooth, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com