

Five-axis bridge type glass stacking robot
A stacking robot and glass technology, applied in the stacking of objects, unstacking of objects, transportation and packaging, etc., can solve the problems of long stacking cycle, high price, low surface quality, etc., to improve production efficiency, workshop The effect of low site space requirements and reduced production input costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The invention will be described in more detail below with reference to the accompanying drawings of specific embodiments of the invention. However, this invention may be embodied in many different forms and should not be construed as limited to the embodiments set forth herein. Rather, these embodiments are provided so that this disclosure will be thorough and complete, and will fully convey the scope of the invention to those skilled in the art.
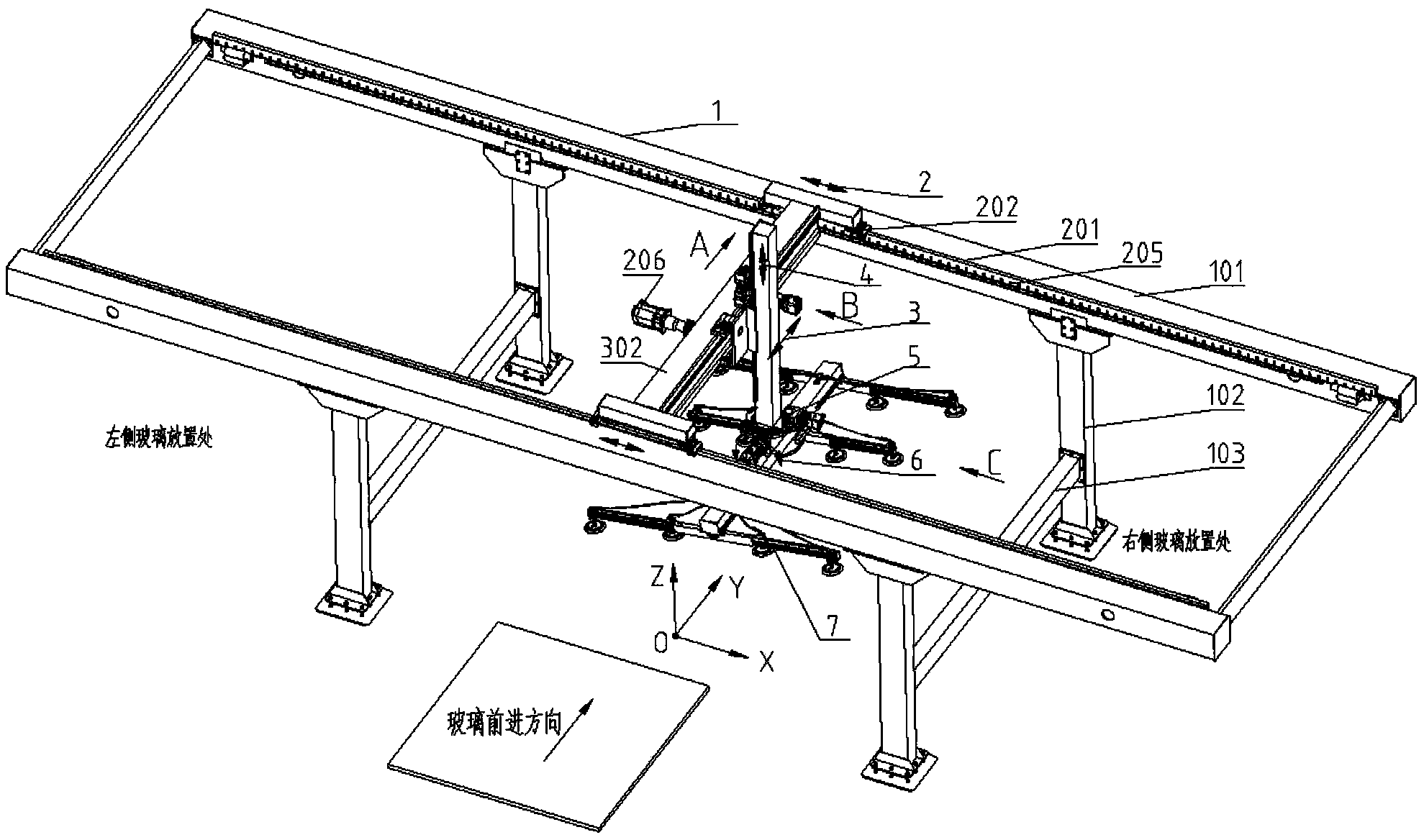
[0026] The five-axis bridge-type glass stacking robot according to the embodiment of the present invention includes a frame, an X travel axis, a Y travel axis (the glass advance direction is the Y axis), a vertical lifting axis, a rotation axis 1, a rotation axis 2, a multifunctional vacuum gripper Take the device.
[0027] The rack mainly consists of outriggers and walking beams, spanning above the glass production line. The appearance is a cantilever bridge structure at both ends. The two walking beams are respectively in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More