

Operation positioning device and method and robot operation system
A positioning device and a technique for surgery, applied in surgery, medical science, diagnosis, etc., can solve the problems of small working space of the positioning system, inconvenient location for collecting images, troublesome disassembly, etc., to overcome the limitation of perspective angle, convenient and flexible positioning, and reduce Effects of Radiation Damage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be described below in conjunction with the accompanying drawings.
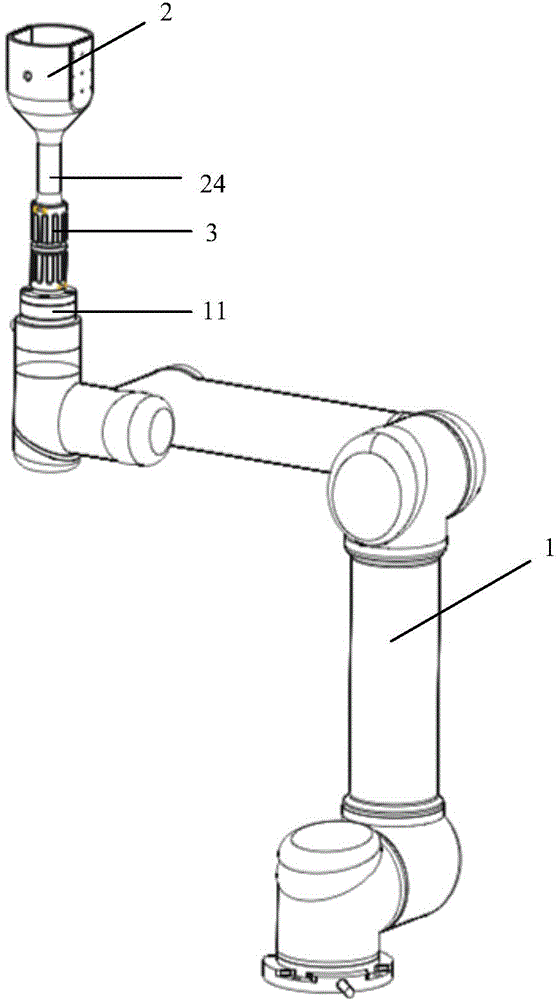
[0032] The invention relates to a surgical positioning device, which comprises a positioning scale, an upper computer and a serial mechanical arm with at least six degrees of freedom. The upper computer is connected to the serial mechanical arm, and the end of the serial mechanical arm is connected to the positioning scale. Such as figure 1 The preferred structure shown includes a six-degree-of-freedom series manipulator 1. The six-degree-of-freedom series manipulator includes six arm segments, and the arm segments are connected in series through joints. The movement of the series manipulator 1 is controlled by the host computer , realize three translations and three rotations by controlling the movement of the series manipulator 1 by the host computer, of course, the series manipulator of the present invention can include more degrees of freedom, or be other configurations of...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Diameter | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More