

Catheter vibration control method of cardiac intervention type magnetic navigation system
A control method and interventional technology, applied in the field of medical device control, can solve the problems of heart damage, reduced navigation and positioning accuracy, uncontrollable attitude transformation speed, etc., so as to improve the success rate, improve the navigation and positioning accuracy and reduce medical damage. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
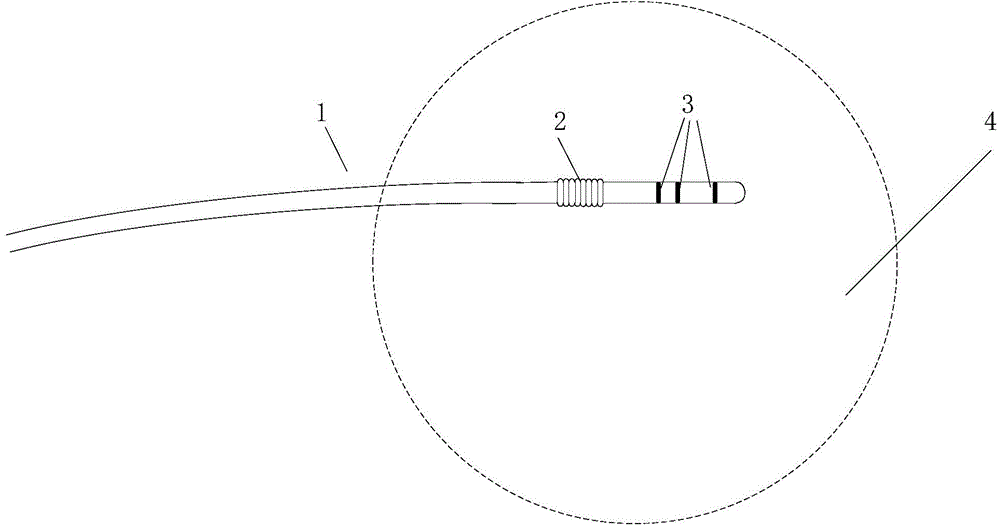
[0022] Such as figure 1 As shown, three permanent magnet rings 2 are installed in the front end of the catheter 1 , and the direction of the magnetic moment of the permanent magnet rings 2 is parallel to the central axis of the permanent magnet rings 2 and points to the end of the catheter 1 . The end of the conduit 1 is equipped with a hose 4, which is convenient for the end of the conduit 1 to turn. The torque applied by the uniform magnetic field to the permanent magnet ring 2 in the navigation area 3 makes the magnetic moment of the permanent magnet ring 2 parallel to the uniform magnetic field, so that the permanent magnet ring 2 is parallel to the external magnetic field. The torque received by the permanent magnet ring 2 is T m =M·B·A m ·L m sin(θ), where: M is the magnitude of the magnetic moment of the permanent magnet ring 2, B is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More