

A robotic jellyfish driven by a built-in barrel motor
A motor-driven, embedded technology, applied in ship propulsion, ship parts, ships, etc., can solve the problems of small effective water spray volume, inapplicability, and small driving force.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
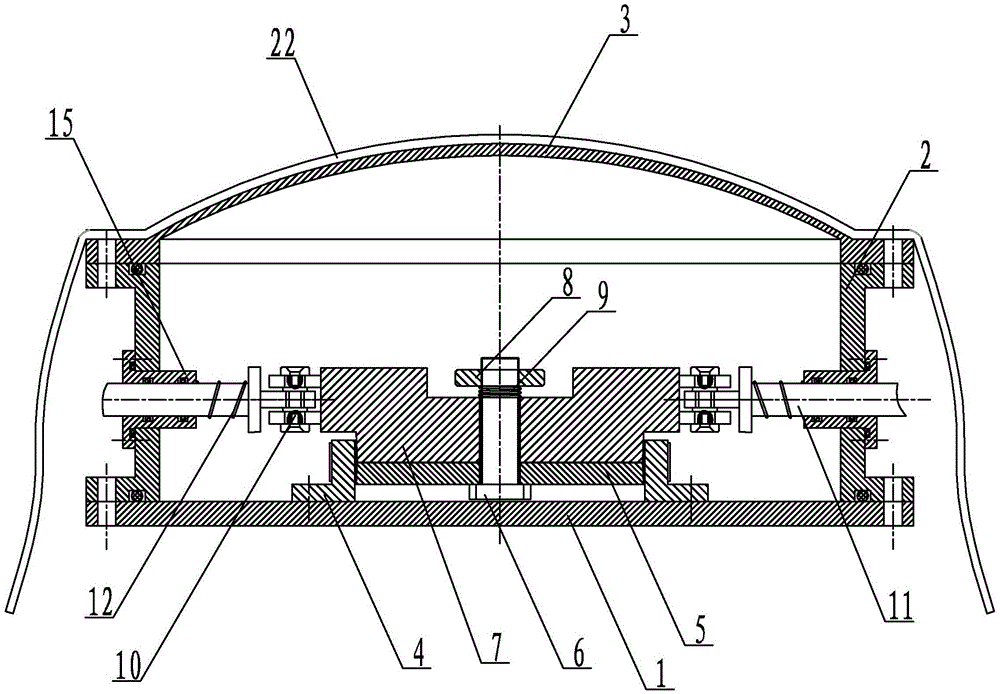
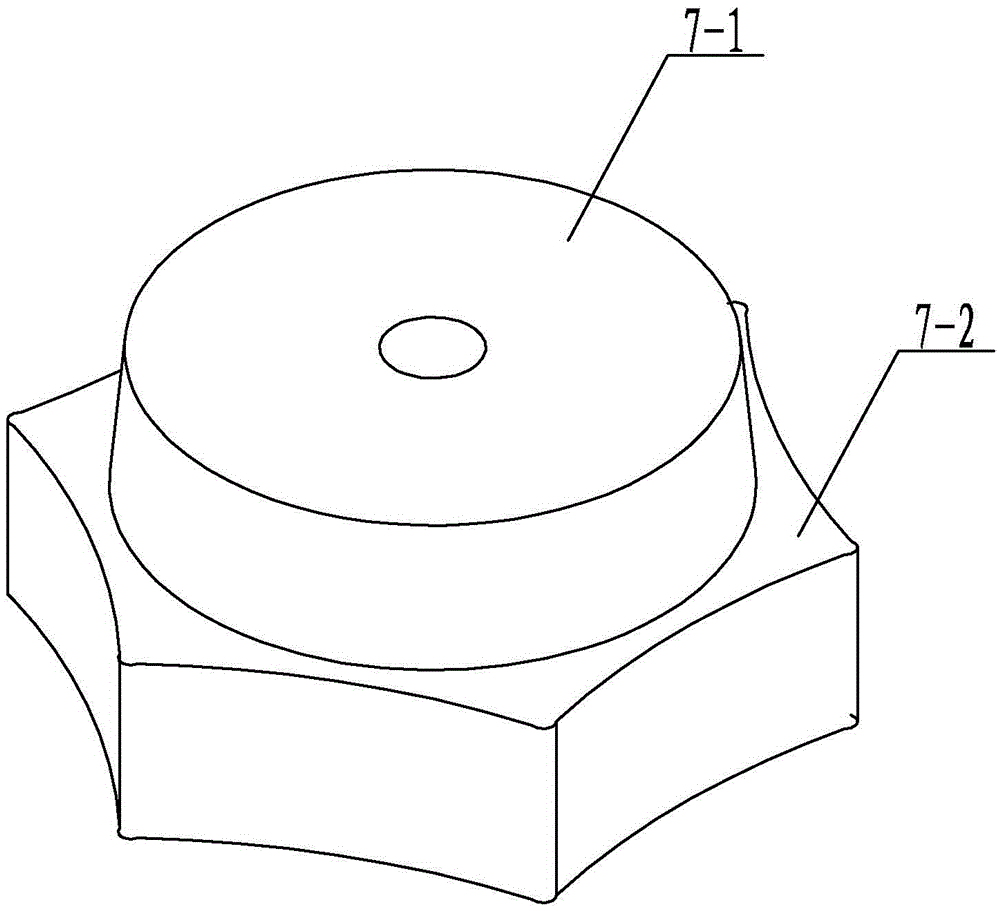
[0015] Specific implementation mode one: combine Figure 1-Figure 5 Describe this embodiment, a robotic jellyfish driven by a built-in cylindrical motor in this embodiment includes a chassis base 1, a sleeve 2, a mechanical abdominal cavity end cover 3, a cylindrical traveling wave ultrasonic motor 4, and a rotor compression end cover 5. Preload bolt 6, transmission cam 7, preload nut 8, preload spring 9, multiple thrust rod guide flanges 15, multiple double roller parts 10, multiple arm thrust rods 11, multiple auxiliary springs 12 and multiple articulated arms,
[0016] The mechanical abdominal cavity end cover 3, the sleeve 2 and the chassis base 1 are sealed and connected sequentially from top to bottom, the cylindrical traveling wave ultrasonic motor 4 is positioned and installed on the chassis base 1 through the bolt group, and the transmission cam 7 is connected through the pre-tightening bolt 6 , the pre-tightening nut 8, the pre-tightening spring 9 and the rotor comp...
specific Embodiment approach 2
[0022] Specific implementation mode two: combination Figure 4 and Figure 5 To illustrate this embodiment, each multi-joint arm of this embodiment includes a first connecting member 16, a second connecting member 17, a first connecting rod 18, a second connecting rod 19, a third connecting rod 20 and a fourth connecting rod 21. One end of the first connecting rod 18, one end of the second connecting rod 19, one end of the third connecting rod 20 and one end of the fourth connecting rod 21 are all connected to an arm thrust rod 11, and the other end of the first connecting rod 18 Connect with the middle part of the fourth connecting rod 21, the other end of the second connecting rod 19 is connected with the second connecting member 17, the other end of the third connecting rod 20 is connected with the first connecting member 16, the other end of the fourth connecting rod 21 Connect with the first connector 16. With such a setting, the movement is more flexible. Other compos...
specific Embodiment approach 3
[0023] Specific implementation mode three: combination figure 1 This embodiment will be described. In this embodiment, the rotor pressing end cover 5 and the pretension spring 9 are in interference fit. Such setting is convenient to ensure that the transmission cam 7 rotates smoothly under the drive of the cylindrical traveling wave ultrasonic motor 4 . Other compositions and connections are the same as those in Embodiment 1 or Embodiment 2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More