

Wireless charging transmitter, receiver, charging device and wireless charging method
A wireless charging and transmitter technology, applied in battery circuit devices, circuit devices, current collectors, etc., can solve the problems of high power consumption of feedback data coding and modulation mode, short vertical transmission distance of electric power, and low output power, etc. Low, high practicability, easy to productize effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
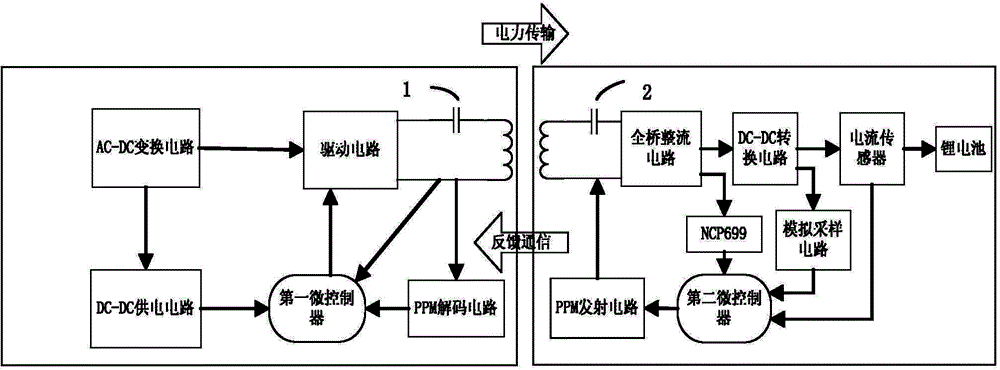
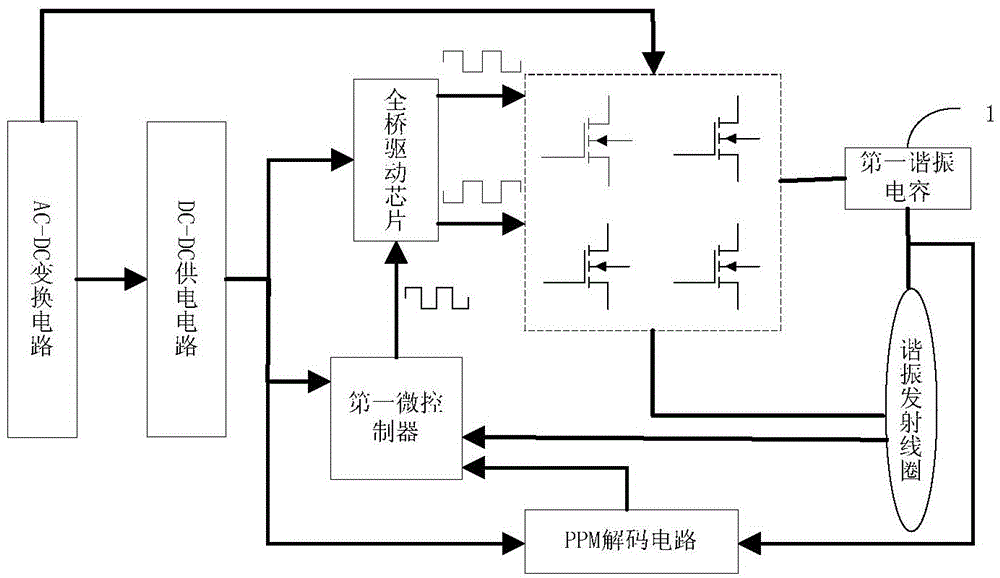
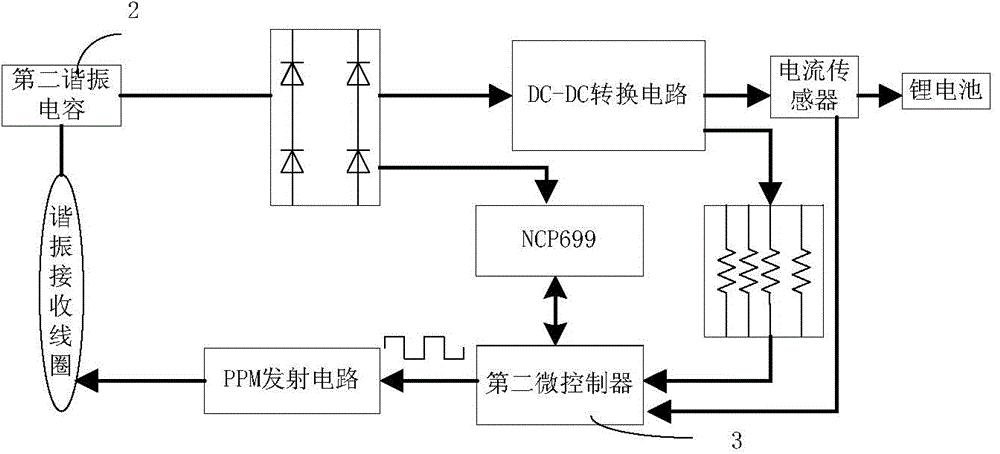
[0051] Such as figure 1 As shown, a wireless charging device is characterized in that it includes a wireless charging transmitter and a wireless charging receiver. The driving circuit of the wireless charging transmitter excites the primary coil at a specific frequency, and the resonant primary coil and the first resonant capacitor 1 in series generate LC resonance to generate electromagnetic waves. The wireless charging receiver receives electromagnetic energy through the LC matching circuit and transmits it through the DC-DC The conversion circuit charges the lithium battery.
[0052] Further, the microcontroller of the wireless charging receiver samples the output voltage and current through an analog sampling circuit and a current sensor, and combines and encodes the analog signals, and the generated PPM signal communicates the charging in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More