Robot body structure for supporting minimally-invasive surgery instrument
A technology of robot body and surgical instruments, applied in the fields of surgery, application, medical science, etc., can solve problems such as the change of remote motion center, achieve the effect of small occupied space, good reliability and stability, and avoid interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] A robot body structure for supporting minimally invasive surgical instruments of the present invention will be described in detail below with reference to the drawings and specific embodiments.
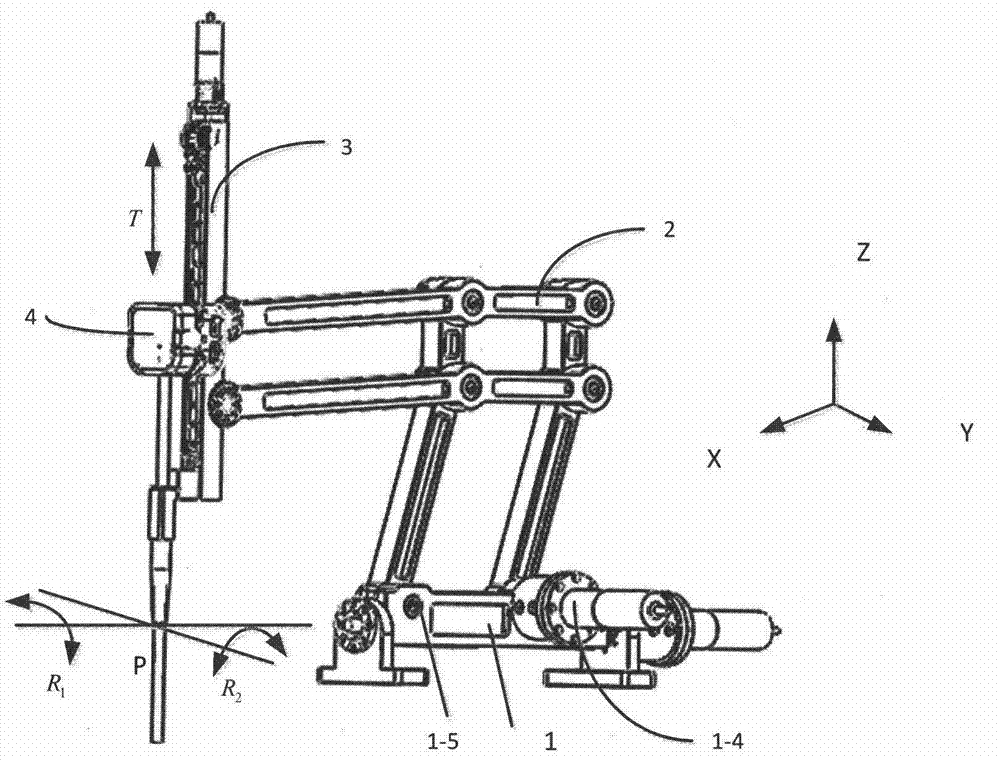
[0026] Such as figure 1 Shown is a schematic diagram of the overall structure of the robot body for supporting minimally invasive surgical instruments. Through the reasonable layout of the four-bar mechanism, the intersection point P of the rotation center of the four-bar support rod unit 1 and the rotation center of the minimally invasive surgical instrument 4 is the remote motion center, leaving an installation space for the installation of the surgical instrument 4, and avoiding remote movement. The center of motion changes, and the mechanism can provide three degrees of freedom: the rotational degree of freedom R around the X axis 1 , the rotational degree of freedom R around the Y axis 2 and the degree of freedom of movement T along the Z direction.
[0027] Such as f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com