

IPMC (Ionic Polymer Metal Composite) driven simulated dragonfly wing flapping robot
A technology of metal composites and ionic polymers, applied in the field of bionic flapping-wing robots, can solve the problems of complex transmission mechanism, low energy utilization rate, heavy mass, etc., and achieve the effect of high transmission efficiency, small mass and simple motion form
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
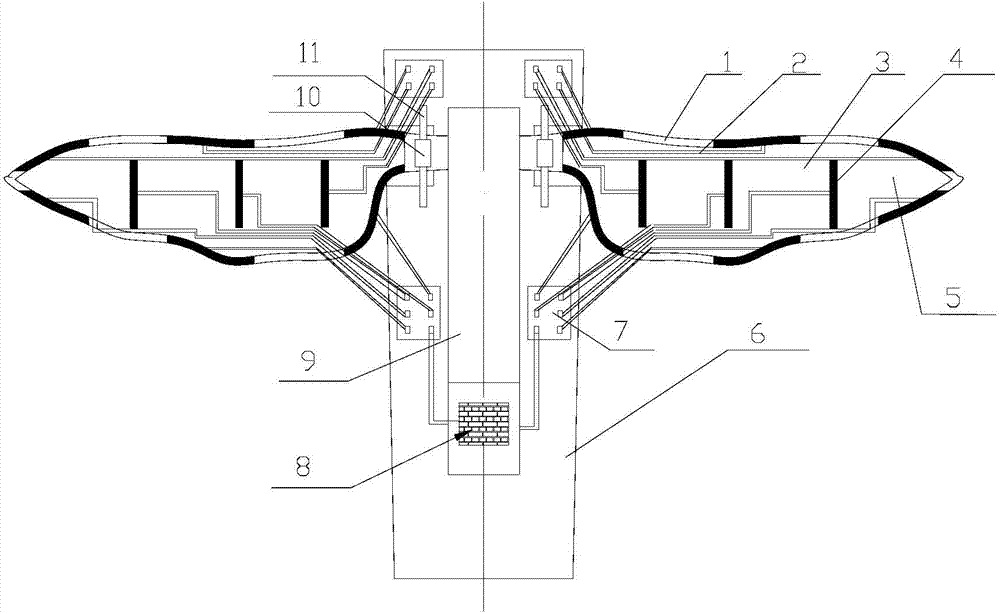
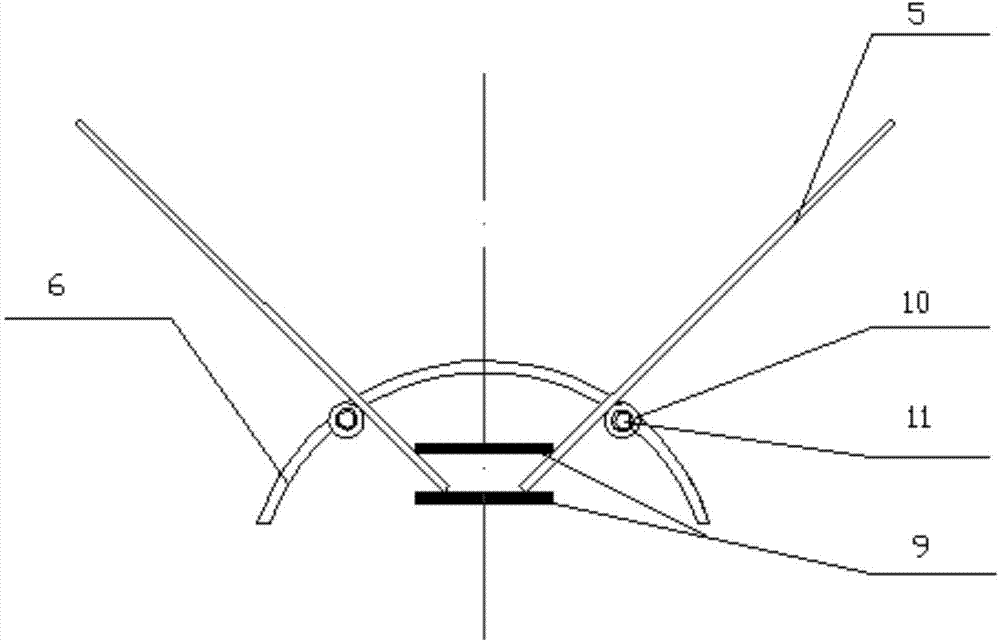
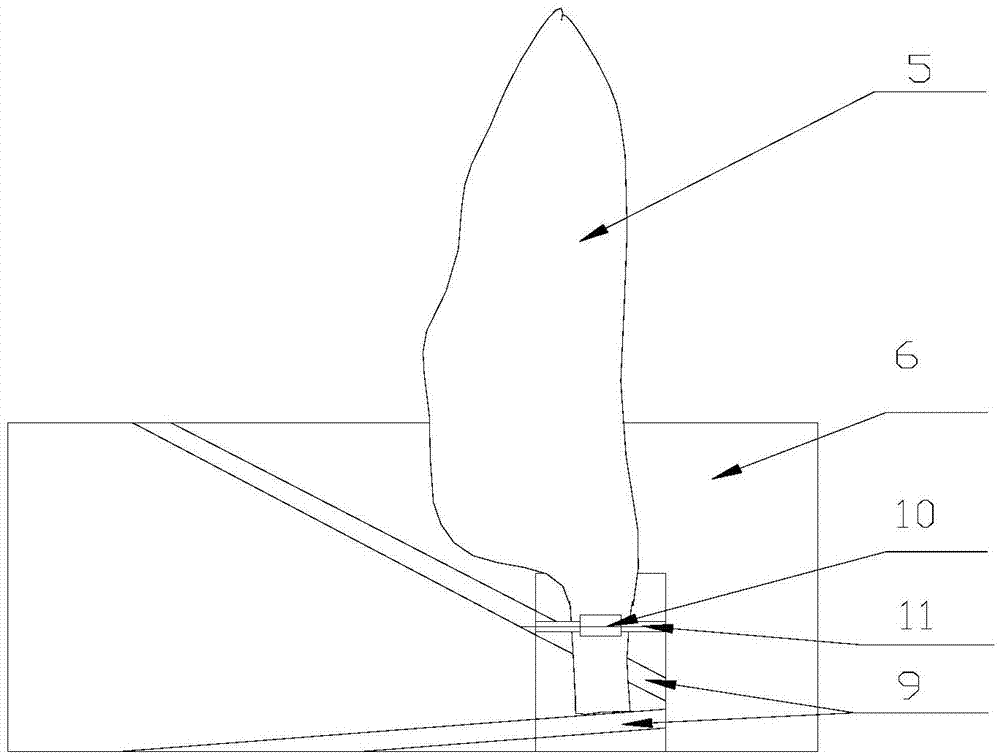
[0028] Such as Figure 1~6 As shown, the embodiment of the present invention is provided with wing pulse 1, wing film 3, wing IPMC driving part 4, wing 5, body 6, circuit controller 7, copper sheet electrode 8, body IPMC driving part 9, fixed shaft 11 .
[0029] Described wing vein 1 and wing film 3 are arranged on the wing 5, and 2 pieces of wing IPMC driving components 4 are set on the wing 5, change the shape of wing 5 and can realize the deformation of wing 5; 2 pieces of body IPMC drive Parts 9 are located at the bottom of the body 6, and one end of the body IPMC driving part 9 is fixed on the body 6, and the other end of the body IPMC driving part 9 is located at the wing root of the wing 5, and the wing 5 is hinged on the body 6 to drive the wing 5 flutters; the copper plate electrode 8 connects the circuit controller 7 with the wing IPMC driving part 4 or the circuit controller 7 and the body IPMC driving part 9 by wire 2, the circuit controller 7, the body IPMC drivi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More