

Robot-assisted oblique-tip flexible needle puncture system and method
A robot-assisted, flexible needle technology, applied in the field of thoracoabdominal soft tissue puncture surgery, can solve the problems of limited two-dimensional puncture of flexible needle models, lack of force sensors, and inability to apply real-time control.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047]Below in conjunction with accompanying drawing and embodiment this patent is described further.
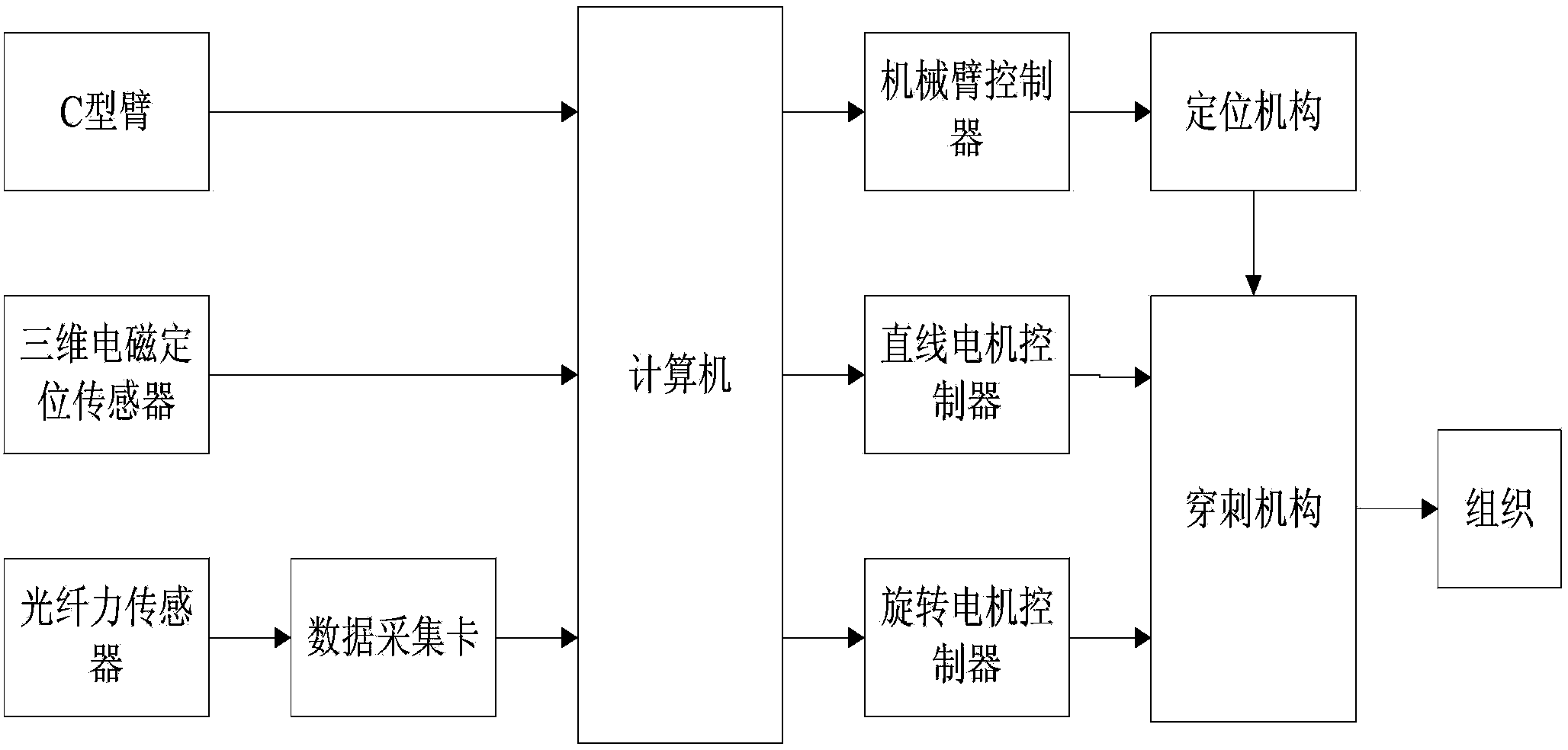
[0048] Such as figure 1 Shown is a system structure block diagram of the present invention, the flexible needle puncture system includes a motion planning control part, a sensing device and a puncture platform.
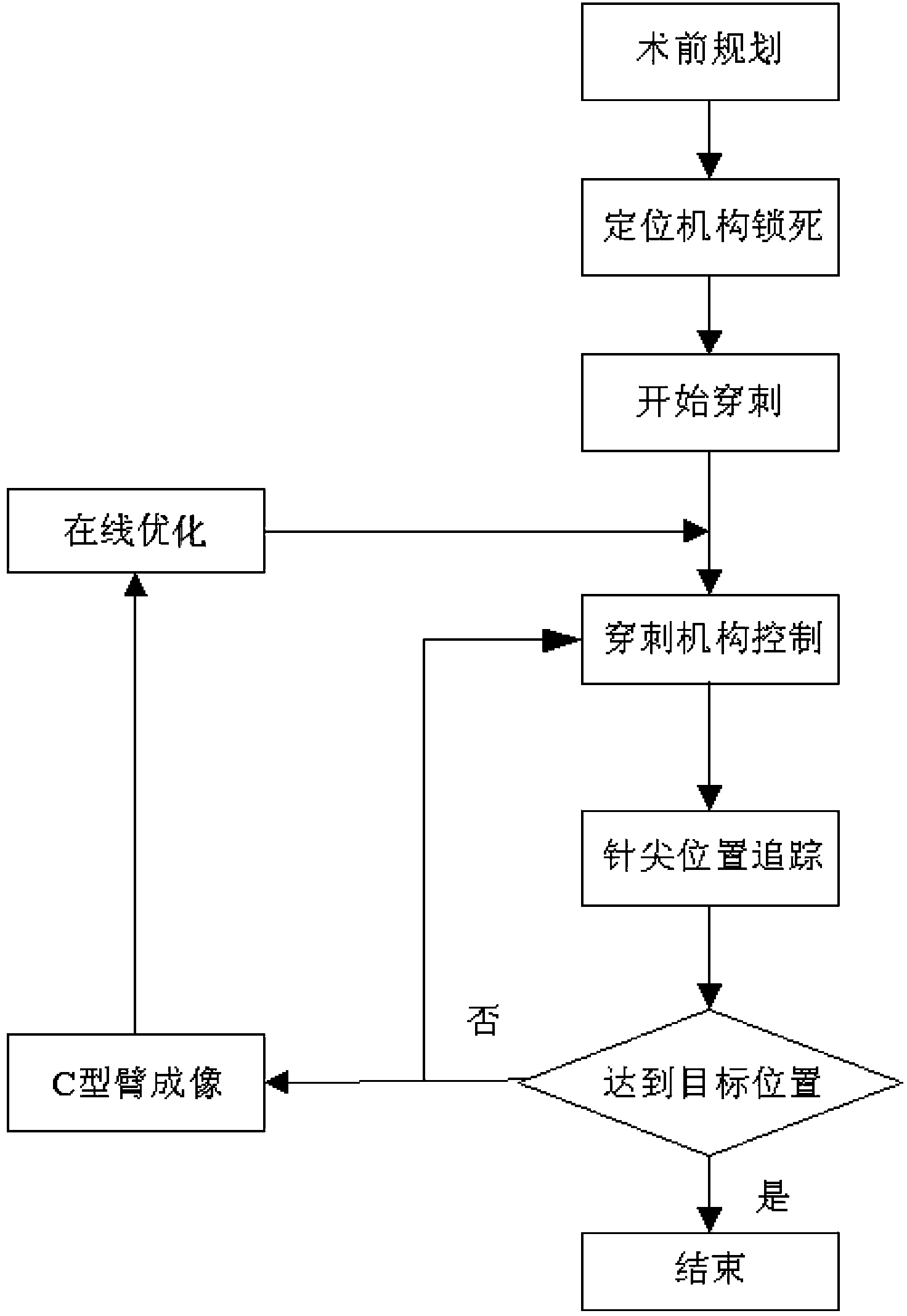
[0049] In the first part, the online path planning for puncture is carried out according to the needle tip position and puncture image information, the deformed target position is reset according to the feedback of C-arm imaging, and the flexible flexible needle is adjusted according to the oblique-tipped flexible needle tip, obstacles and target position. The needle puncture trajectory is re-planned to obtain a new path planning result, and then the path planning result is passed to the controller;
[0050] According to the force information of the needle tip fed back by the optical fiber force sensor, the online path planning correction of the flexible needle mod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More