At present, several research institutions at home and abroad have carried out research on wearable lower limb assist
robot technology, and individual research results have even been transformed into products for sale, such as the power-assisted mechanical suit BLEEX developed by the University of California, Berkeley, and the Cybernics experiment at the University of Tsukuba, Japan. Although the
exoskeleton robot HAL developed by the laboratory has rich functions and good assisting effect, the manufacturing cost remains high due to the large number of power sources and sensing devices used in the robot body, and the
cost performance is lost. It makes it difficult to control the robot, and it has a strong sense of weight when worn on the
human body, and its portability is poor, so it is difficult to popularize
[0004] ZL201310034245.1 reported "a wearable lower extremity
exoskeleton walking aid robot", which is composed of
ankle joint movement module,
knee joint movement module, hip joint movement module, drive module,
waist and support frame module, etc. The motor cooperates with the screw nut transmission mechanism to drive each joint movement module to realize the assistance of the lower limbs when the
human body walks. It has the advantages of good human-
machine movement coordination and compact structure.
Human body wearing
exoskeleton robot has a strong sense of load, and it is not convenient for users to carry the robot with them
[0005] ZL201020568411.8 reported "a
human body exoskeleton load-bearing walking assist device driven by a
linear motor", which consists of a back frame, a hip
joint component, a thigh component, a lower leg component, an
ankle bone component, a base plate, a power supply, a control device, a sensor and a drive It is composed of various parts such as the device, and the electric cylinder of the
linear motion drives the joints of the lower limbs to rotate, thereby providing assistance to the human body that walks with weight. It has the advantages of small size, low
energy consumption, easy control, and low manufacturing cost. However, due to The
linear motor itself occupies a large axial dimension and is constrained by the movement
stroke, which limits the
range of motion of the joints of the lower limbs. Since each joint needs to be driven by an independent
linear motor, it is not conducive to the coordinated
motion control of the entire lower limbs of the human body, and the walking assist The device does not have a portable function, which affects the user's daily use
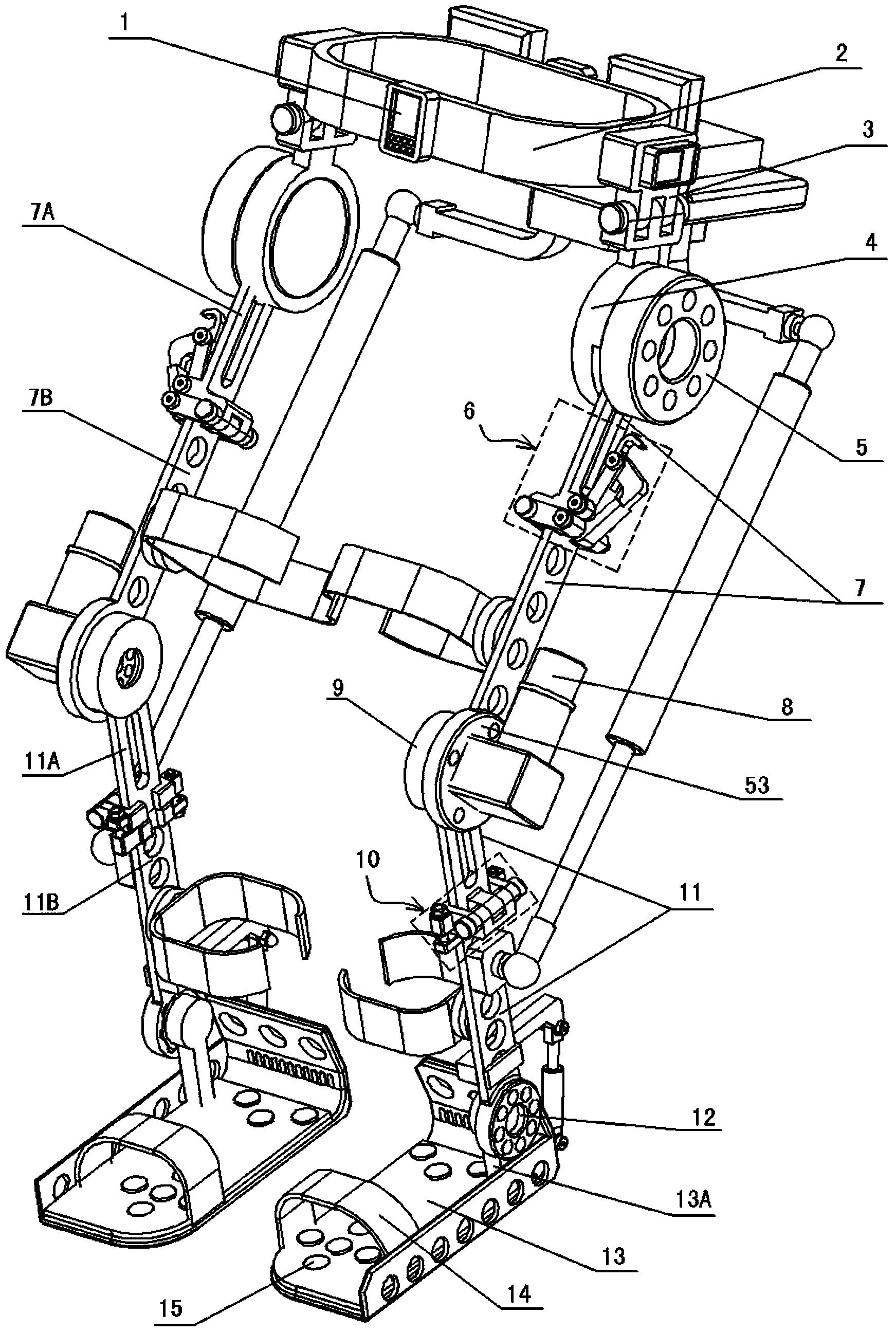
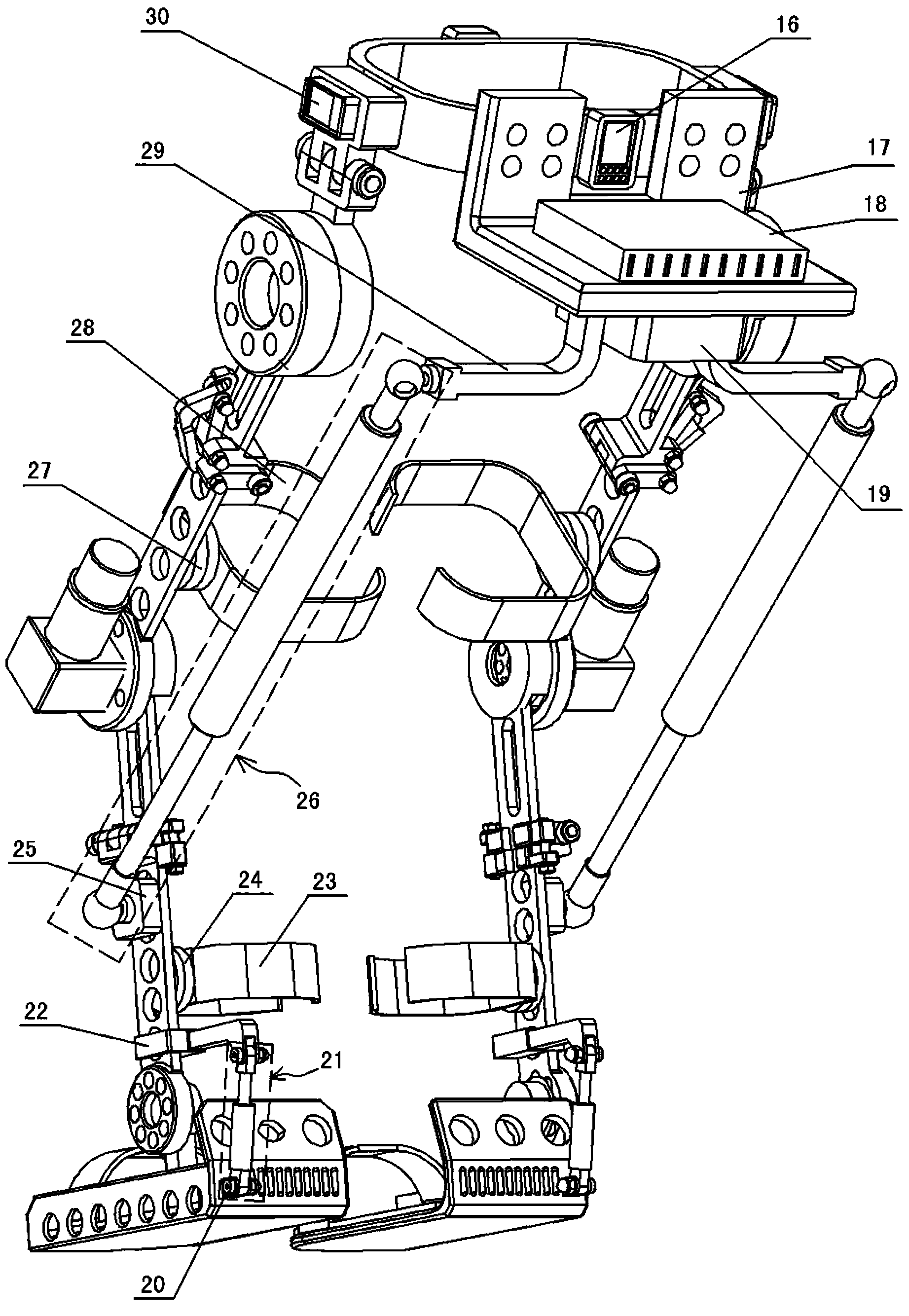
[0006] ZL201210370645.5 reported a "portable wearable lower limb
rehabilitation and walking aid
exoskeleton robot", which consists of sequentially connected thigh support parts,
knee joint parts, calf support parts and
ankle joint foot parts. The rod drives the joint movement, which has the advantages of light and small size, suitable for wearing and easy to carry. However, the robot does not have the
perception module for detecting human-computer interaction information and
human motion posture and the necessary anti-falling device, which is not conducive to external use. The
intelligent control of the skeletal robot affects the coordination of human-computer interaction and reduces the safety of the user when using the robot; moreover, the portable performance of the robot is only for the convenience and reliability of the components that make up the
leg mechanism. In terms of disassembly and combination, the process is time-consuming, and the robot itself cannot be transformed into a portable body, lacks specific carrying and shipping tools, and does not solve the problem of user collection after use, so the versatility is poor



 Login to View More
Login to View More  Login to View More
Login to View More