Press pin control method and system of automatic robot hole-making equipment
The technology of a control method and control system is applied in the field of presser foot control method and system of robot automatic hole making equipment, which can solve the problems such as no public presser foot control method, shorten the process cycle, ensure the quality of hole making, and realize soft touch Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] Below in conjunction with each accompanying drawing, the present invention is described in detail.
[0043] A presser foot control method for robot automatic hole making equipment, comprising the following steps:
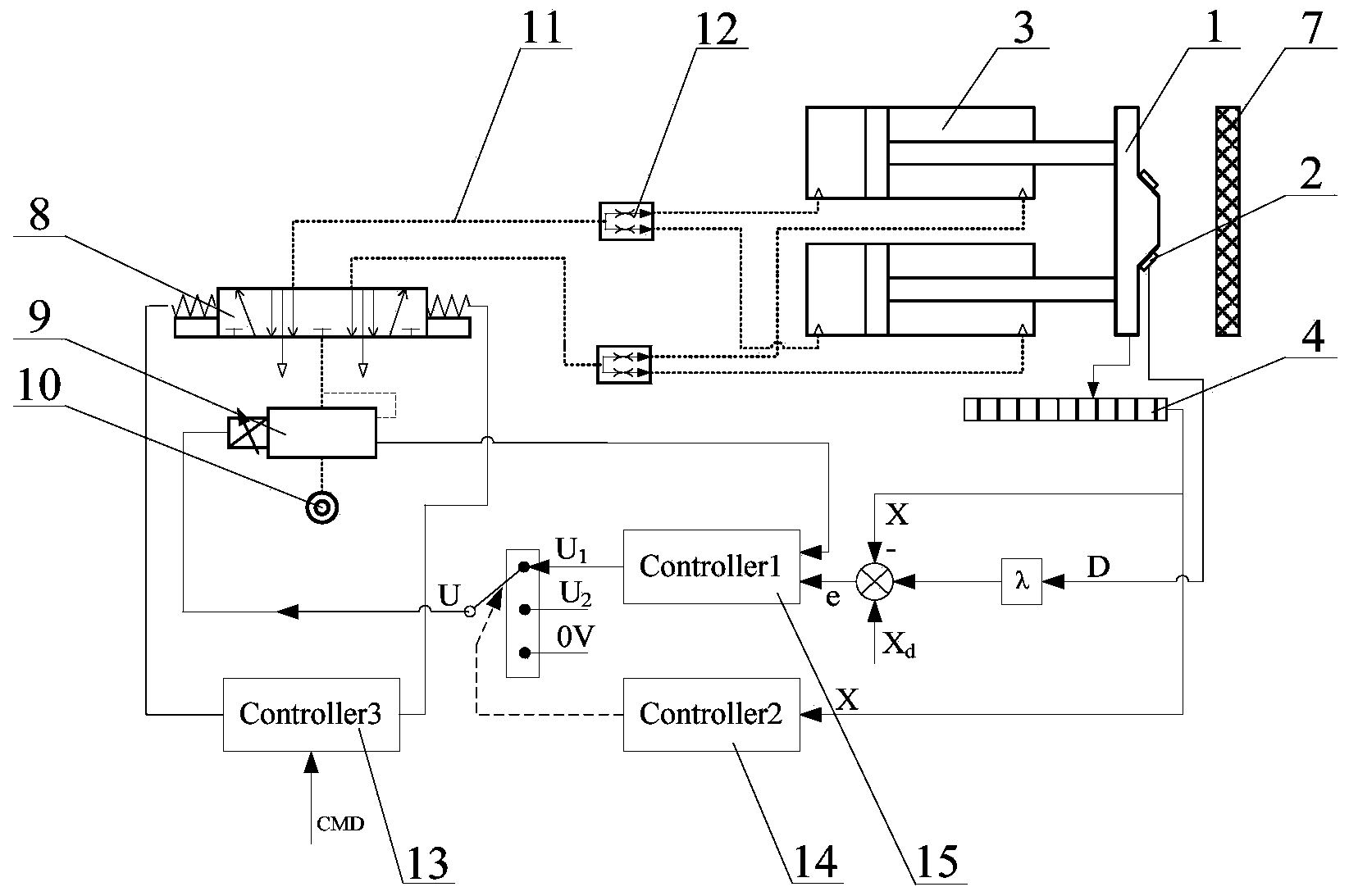
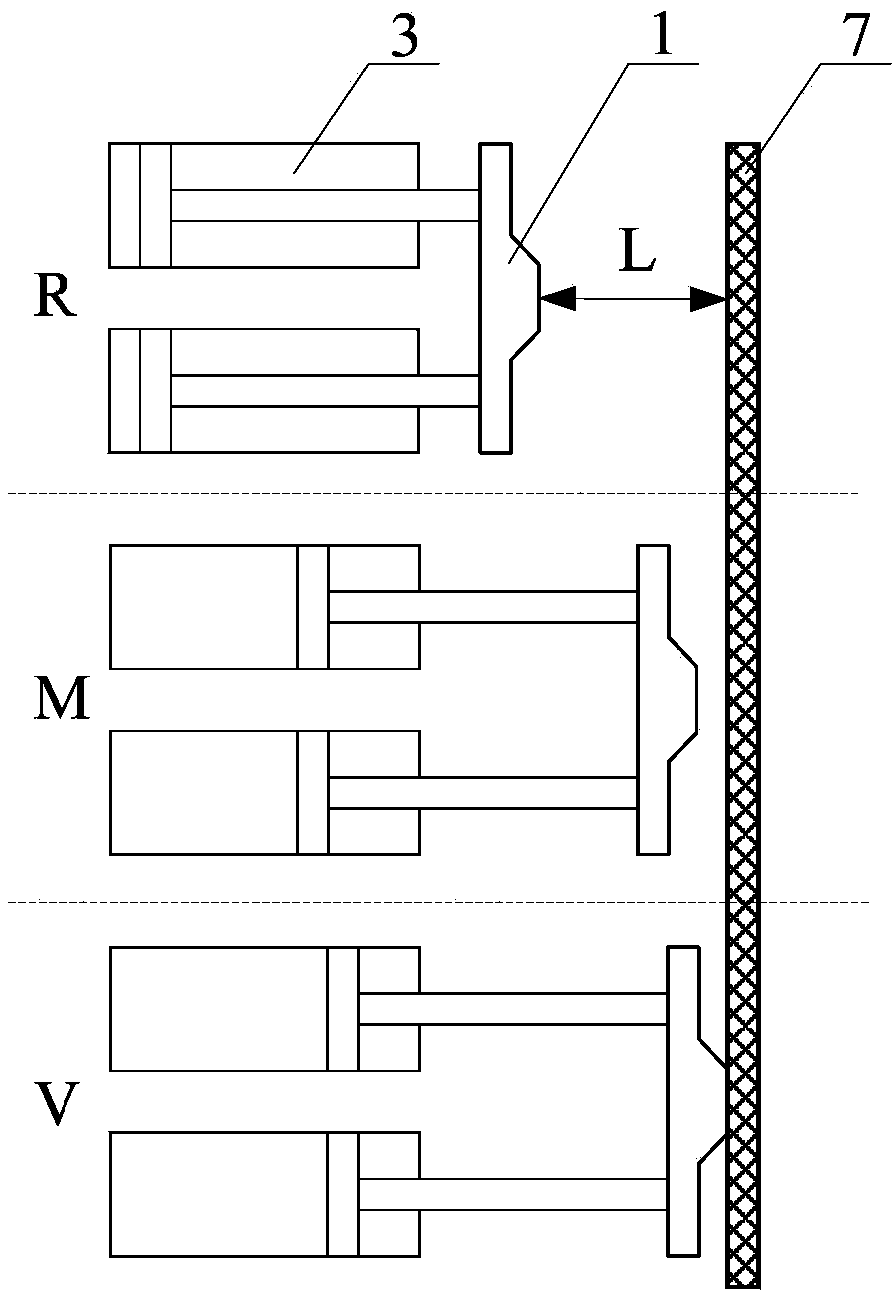
[0044] 1) Measure the position of the presser foot, the distance between the presser foot and the workpiece, set the command position, and obtain the deviation of the current position of the presser foot relative to the command position. There is a gap between the command position and the working position, and the gap is small:
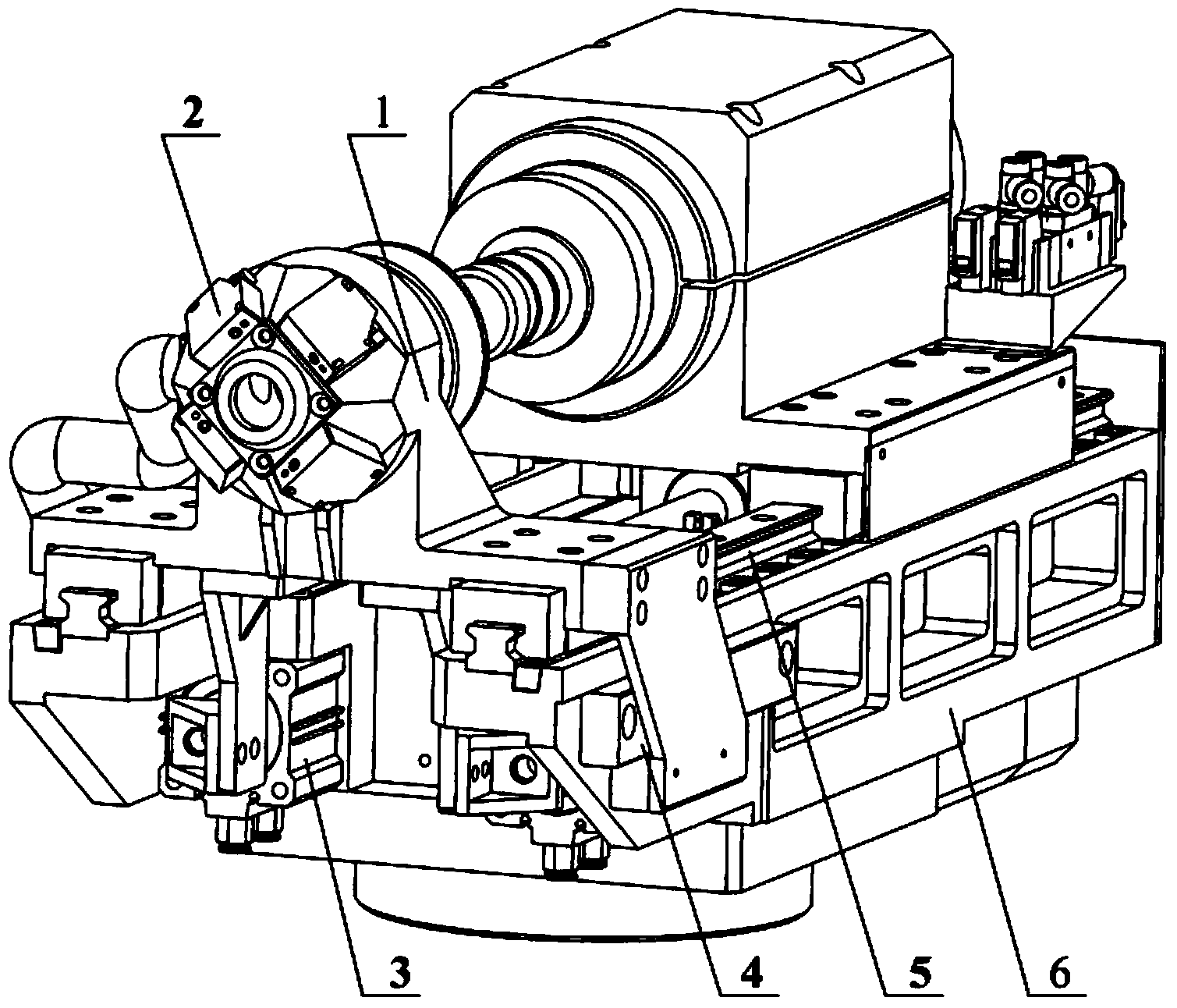
[0045]The position of the presser foot is X, which is measured by the absolute grating; the distance between the presser foot and the workpiece is D, which is measured by the laser ranging sensor; the command position is X d , the deviation of the current position of the presser foot relative to the command position is e(t), e(t)=X d +λD-X, where λ is the feedback gain coefficient, and λ is 25 in this embodiment.
[0046] 2) Accord...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com