Automatic multi-direction material carrying, loading and unloading equipment
A loading and unloading equipment, multi-directional technology, applied in the direction of transportation and packaging, lifting devices, hoisting devices, etc., can solve the problems of consuming manpower and material resources, unsuitable handling methods, low intelligence level, etc., to achieve large working space and save Manpower and time, the effect of high control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings, but the content protected by the present invention is not limited to the following description.
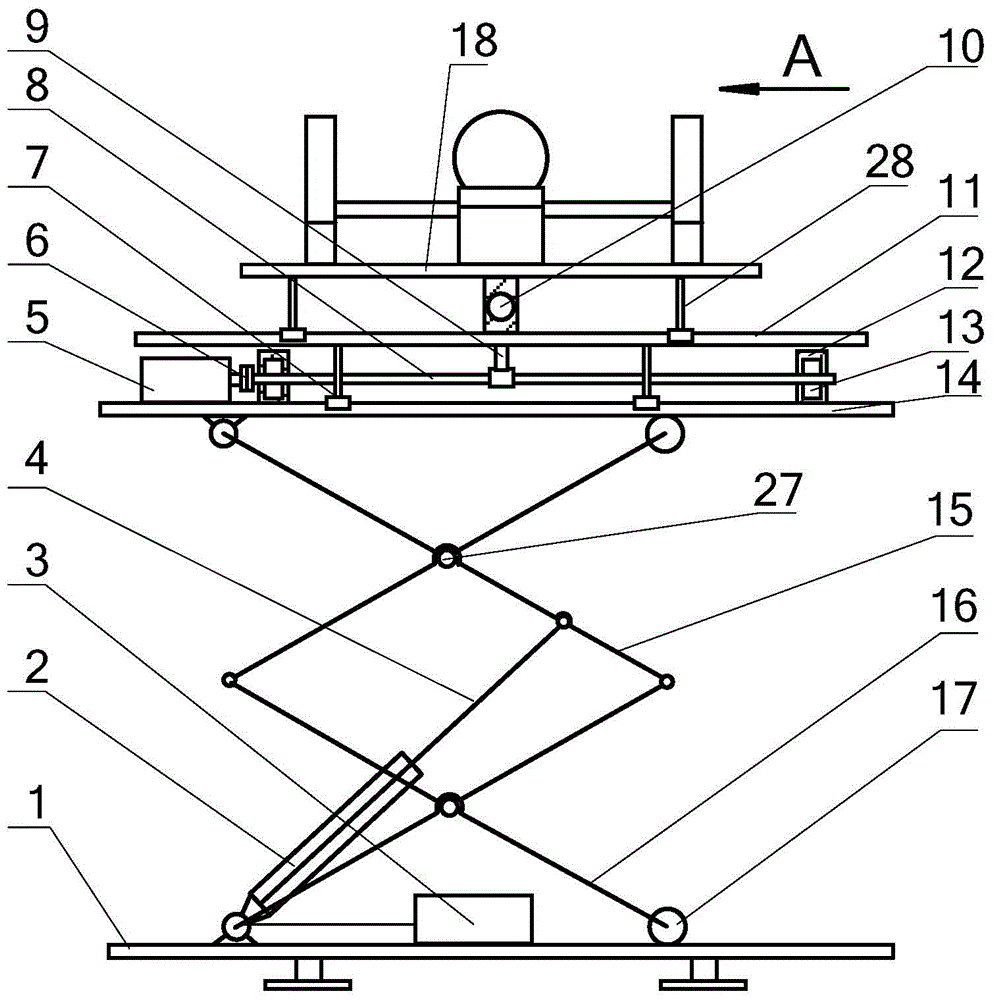
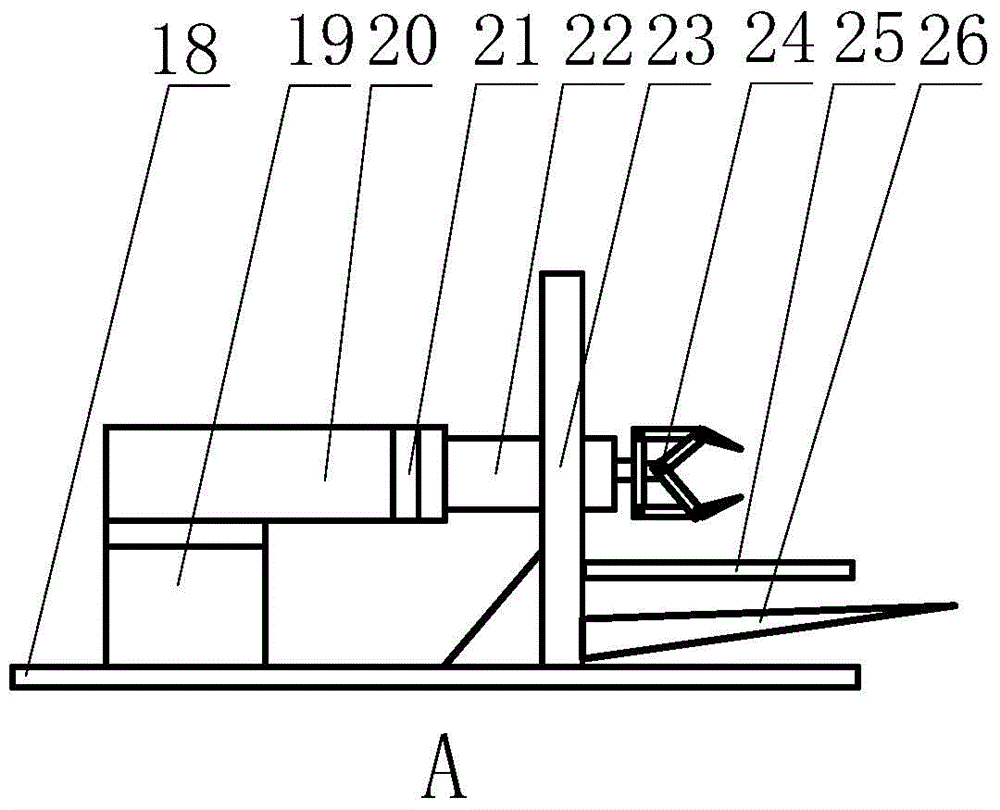
[0025] Such as figure 1 As shown, a multi-directional material automatic handling and loading and unloading equipment includes a vertical lifting platform, an X / Y horizontal feeding device and a loading and unloading workbench. The vertical lifting platform is used for vertical material handling, and the X / Y horizontal feeding device It is used to carry materials on the X / Y plane. The loading and unloading table is used for placing and loading and unloading materials. The X / Y horizontal feeding device is installed on the vertical lifting platform, and the loading and unloading table is installed on the X / Y horizontal feed On the feeding device, there is a loading and unloading manipulator on the loading and unloading table.
[0026] Further, the ve...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



