

Aerial radio monitoring intelligent robot
A radio monitoring and intelligent robot technology, applied in radio wave measurement systems, beacon systems using radio waves, instruments, etc., can solve the problems of high technical requirements for operators, large body, complex structure, etc., to ensure safe flight, The effect of high level of intelligence and simple operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
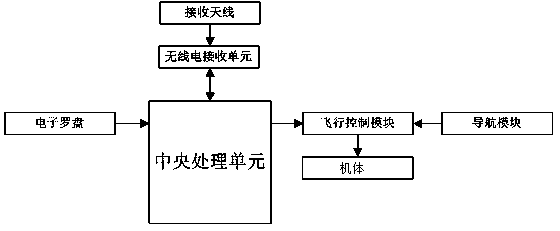
[0064] Airborne radio monitoring intelligent robots, including:
[0065] airframes for flight;
[0066] A flight control module for controlling the flight of the airframe;
[0067] Receiving antennas for acquiring radio signals;
[0068] An electronic compass used to obtain the direction pointed by the receiving antenna and obtain the azimuth corresponding to the direction in real time;
[0069] a radio monitoring receiving unit for receiving radio signals;
[0070] Central processing unit for managing monitoring tasks, dispatching flight control modules, dispatching radio monitoring receiving units, analyzing monitoring data and recording monitoring data;
[0071] Navigation module for navigation and self-positioning;
[0072] The receiving antenna, the electronic compass, the radio monitoring receiving unit, the central processing unit, the flight control module and the navigation module are all installed on the body, and the central processing unit is connected with the...
Embodiment 2
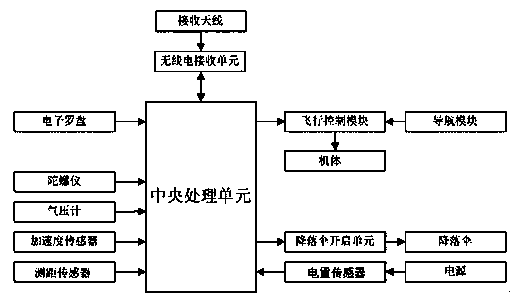
[0095] Airborne radio monitoring intelligent robots, including:
[0096] airframes for flight;
[0097] A flight control module for controlling the flight of the airframe;
[0098] Receiving antennas for acquiring radio signals;
[0099] An electronic compass used to obtain the direction pointed by the receiving antenna and obtain the azimuth corresponding to the direction in real time;
[0100] a radio monitoring receiving unit for receiving radio signals;
[0101] Central processing unit for managing monitoring tasks, dispatching flight control modules, dispatching radio monitoring receiving units, analyzing monitoring data and recording monitoring data;
[0102] Navigation module for navigation and self-positioning;
[0103] The receiving antenna, the electronic compass, the radio monitoring receiving unit, the central processing unit, the flight control module and the navigation module are all installed on the body, and the central processing unit is connected with the...
Embodiment 3
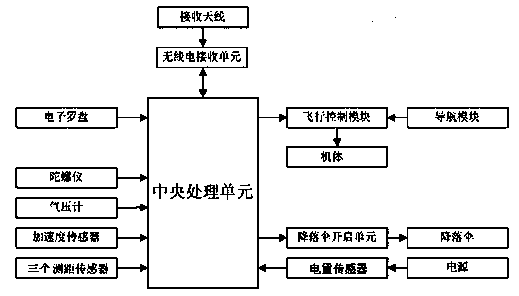
[0125] Airborne radio monitoring intelligent robots, including:
[0126] airframes for flight;
[0127] A flight control module for controlling the flight of the airframe;
[0128] Receiving antennas for acquiring radio signals;
[0129] An electronic compass used to obtain the direction pointed by the receiving antenna and obtain the azimuth corresponding to the direction in real time;
[0130] a radio monitoring receiving unit for receiving radio signals;
[0131] Central processing unit for managing monitoring tasks, dispatching flight control modules, dispatching radio monitoring receiving units, analyzing monitoring data and recording monitoring data;
[0132] Navigation module for navigation and self-positioning;
[0133] The receiving antenna, the electronic compass, the radio monitoring receiving unit, the central processing unit, the flight control module and the navigation module are all installed on the body, and the central processing unit is connected with the f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More