

MEMS strapdown inertial navigation initial alignment method based on adaptive central difference Kalman filtering
A Kalman filter and central difference technology, applied in the field of navigation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0086] 1. Use GPS to determine the initial longitude and latitude parameters of the carrier;
[0087] 2. Collect the data output by the MEMS accelerometer and magnetometer; use the analytical method to perform rough alignment, and roughly obtain the attitude moment from the carrier coordinate system to the calculation geographic coordinate system First, the output signal of the MEMS accelerometer is used to determine the pitch angle and roll angle of the carrier. The principle is that under the condition of a static base, the gravitational acceleration has no projection component in the horizontal direction of the geographical coordinate system, and only has a projection component on the Z axis. The output is measured and then the magnetometer output signal is used to determine the heading angle of the vehicle.
[0088]
[0089] where θ 0 ,γ 0 , They are pitch angle, roll angle and heading angle;
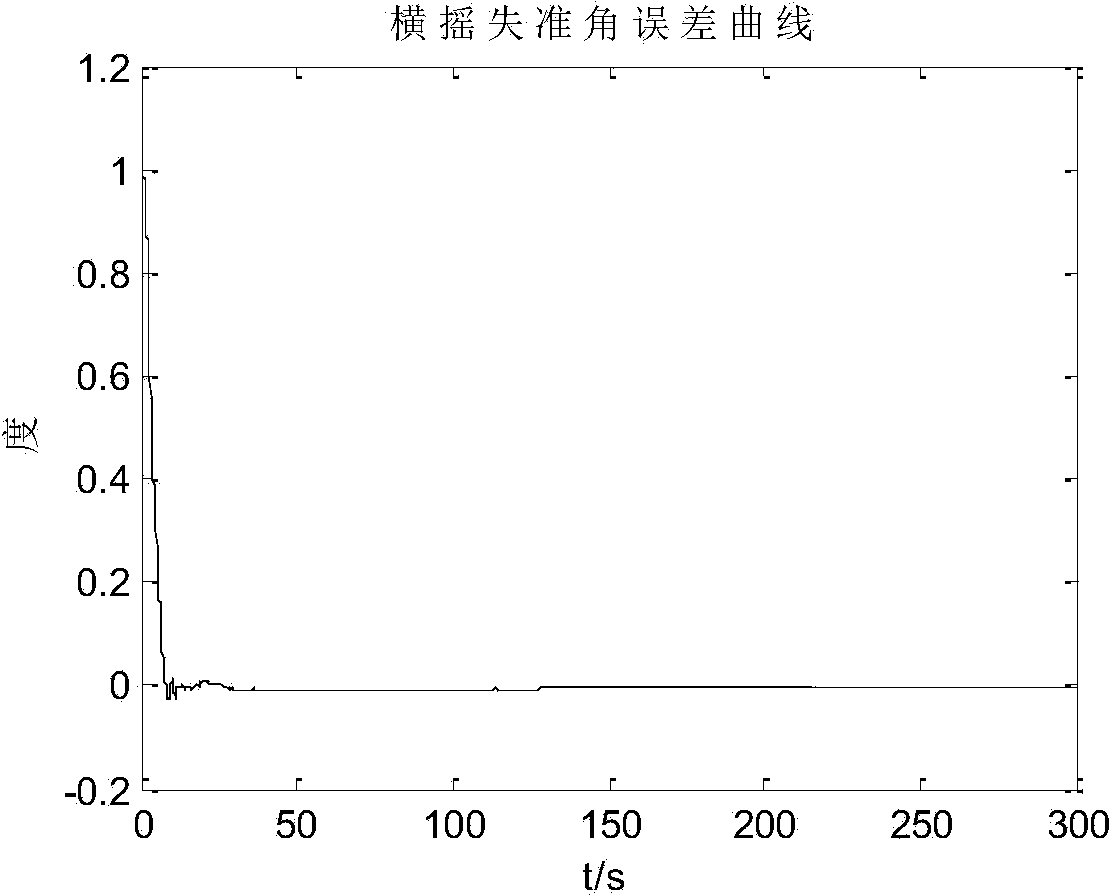
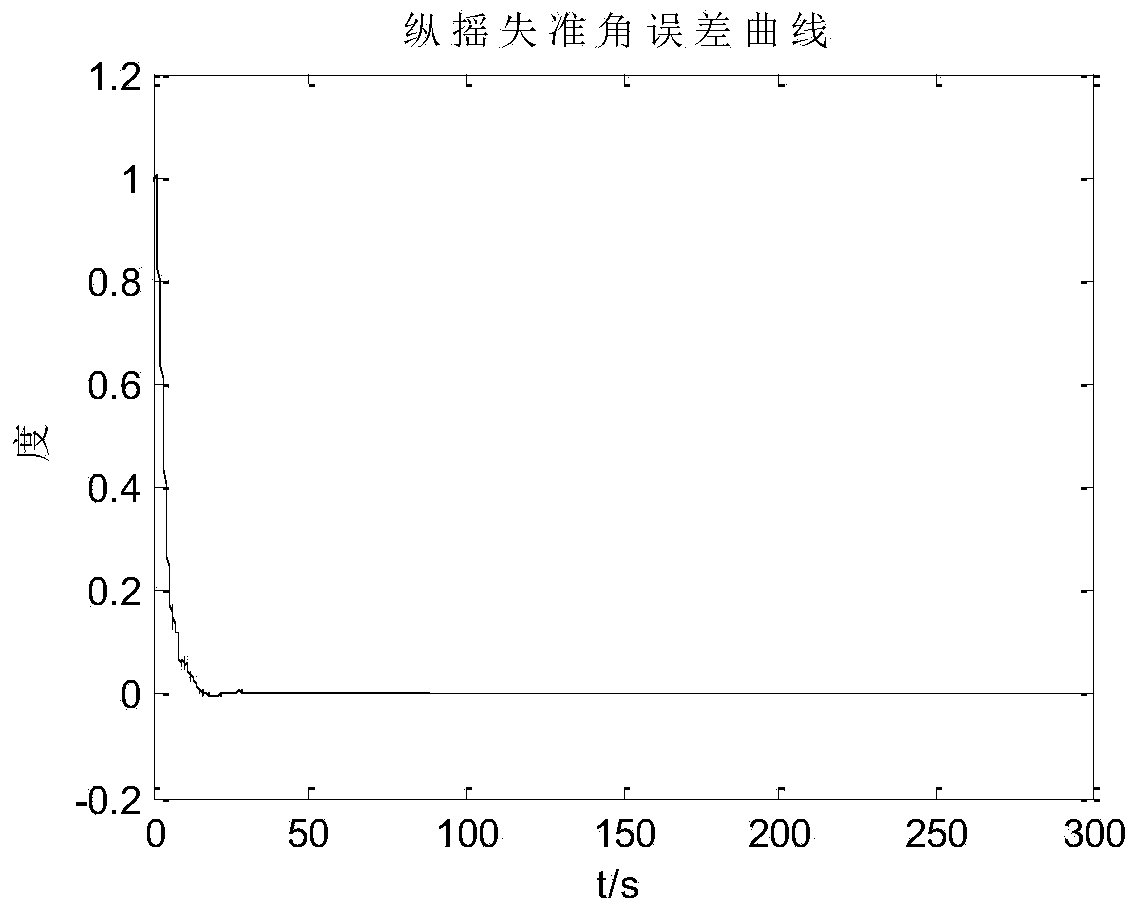
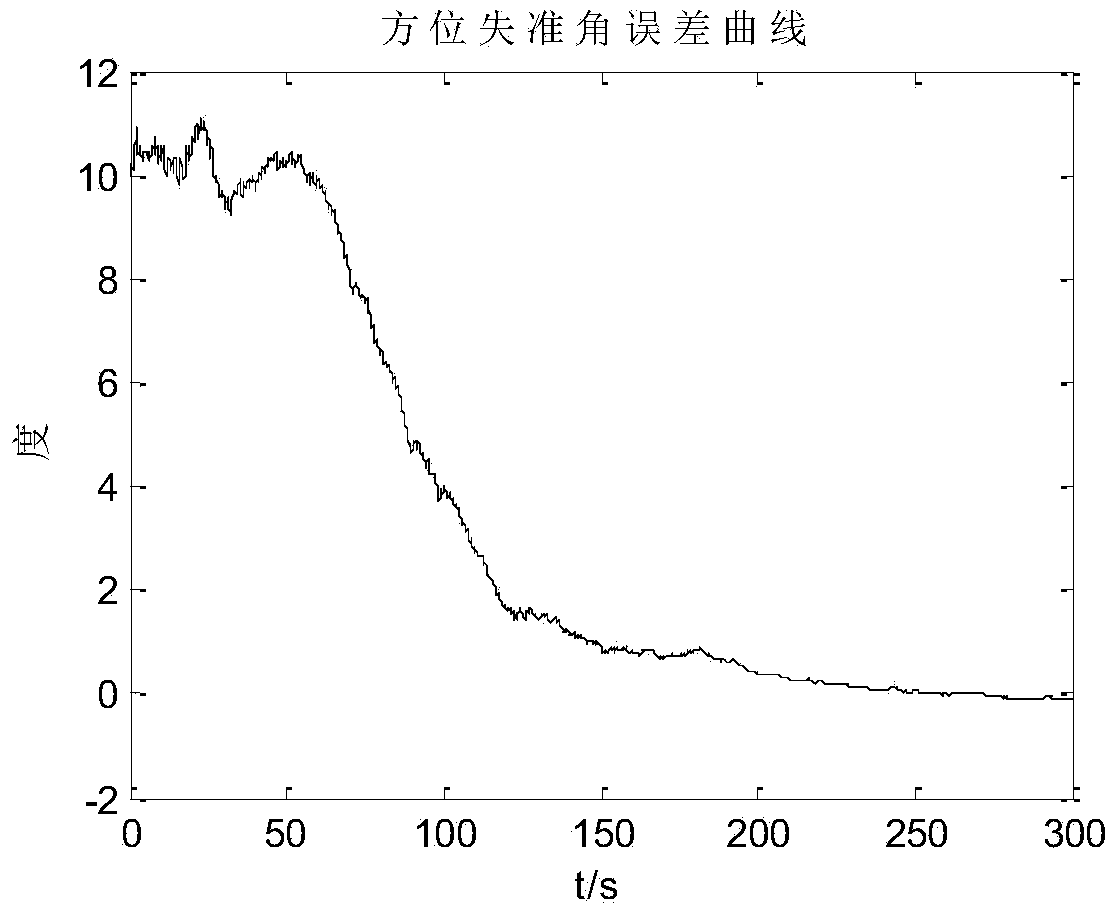
[0090] 3. After the rough alignment is completed, the horizontal misal...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More