

Double-arm robot modularized joint with hollow structure
A technology of modular joints and robots, which is applied in the direction of manipulators, manufacturing tools, joints, etc., can solve the problems of non-applicability, high cost, low transmission accuracy, etc., and achieve a large load-to-weight ratio, high transmission accuracy, and high integration. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] Further describe the present invention below in conjunction with embodiment and accompanying drawing thereof:
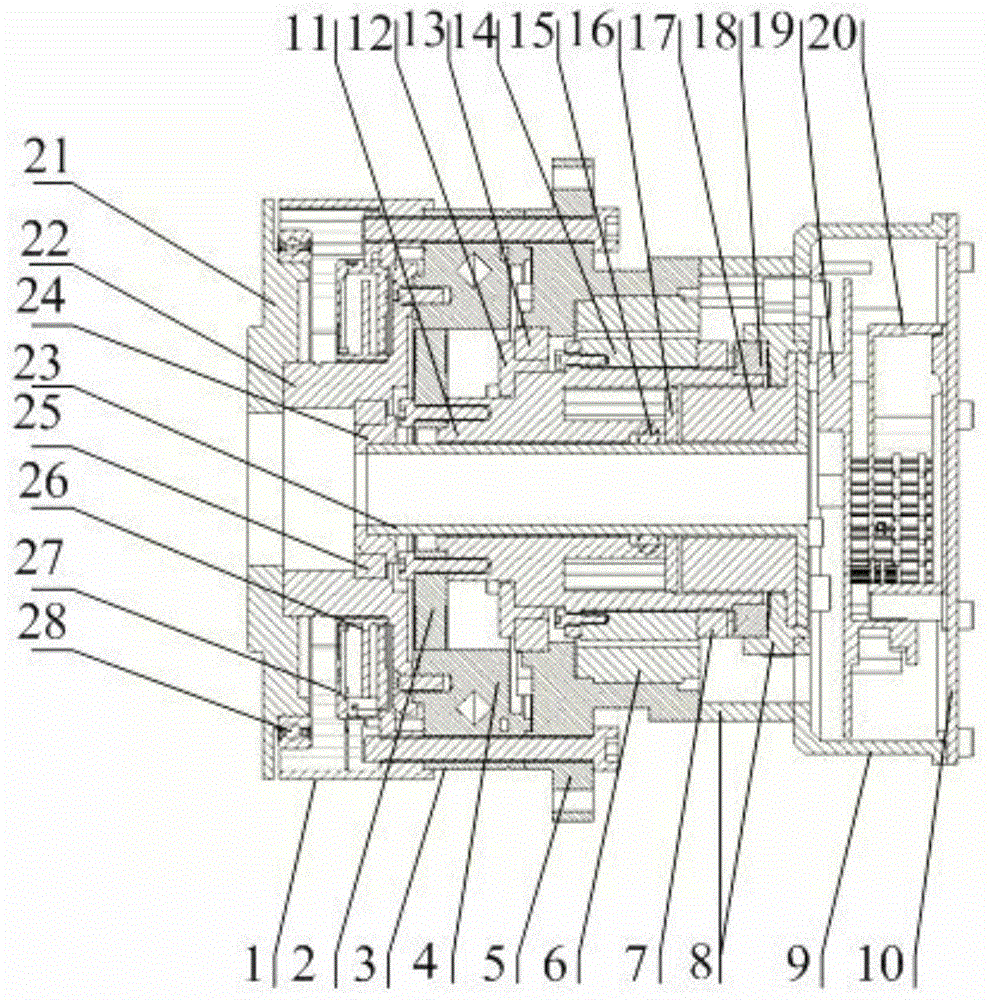
[0054] Such as Figure 1 to Figure 16 As shown, a modular joint of a dual-arm robot with a hollow structure in the present invention includes: a motor, an input device, an output device, a hollow brake, an absolute encoder, and a harmonic reducer.
[0055] The input device is fixed by flange I5, including: hollow motor rotor 14, rotor axial positioning sleeve 7, third motor bearing 18, hollow brake rotor 16, O-shaped sealing ring 15, second motor bearing 13, bearing Gland 12 and harmonic reducer wave generator 2;
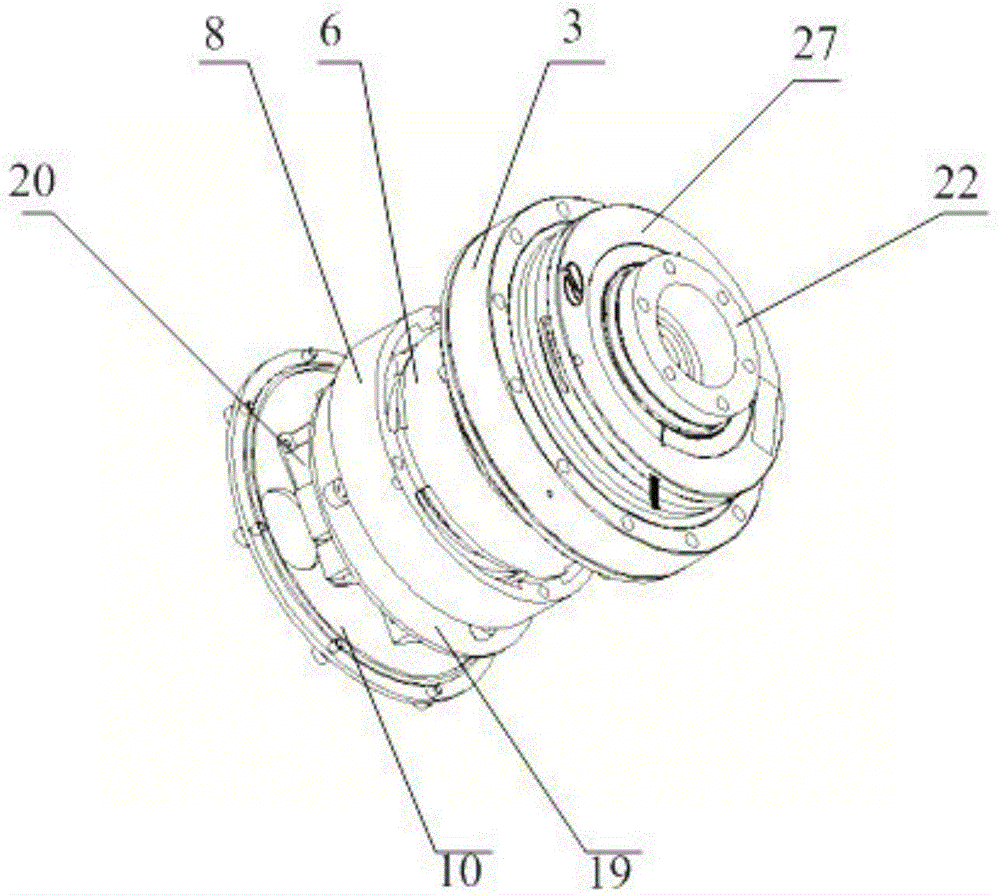
[0056] The output device includes: joint output flange 21, first output bearing 28, DS90 mounting flange 22, absolute encoder rotor 26, sealed bearing 25 and harmonic reducer steel wheel 3;
[0057] The input device and the output device are connected through the main transmission shaft 11;
[0058] Such as figure 2 As shown, the motor stator 6...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More