

Extraction method and extraction device for robot spraying track based on curve three-dimensional reconstruction
A technology of three-dimensional reconstruction and trajectory extraction, which is applied to spray devices, instruments, 3D modeling, etc., can solve problems such as inability to accurately extract workpiece surface information, and difficulty in finding spraying trajectories, so as to improve smoothness and production. Efficiency, the effect of ensuring continuity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
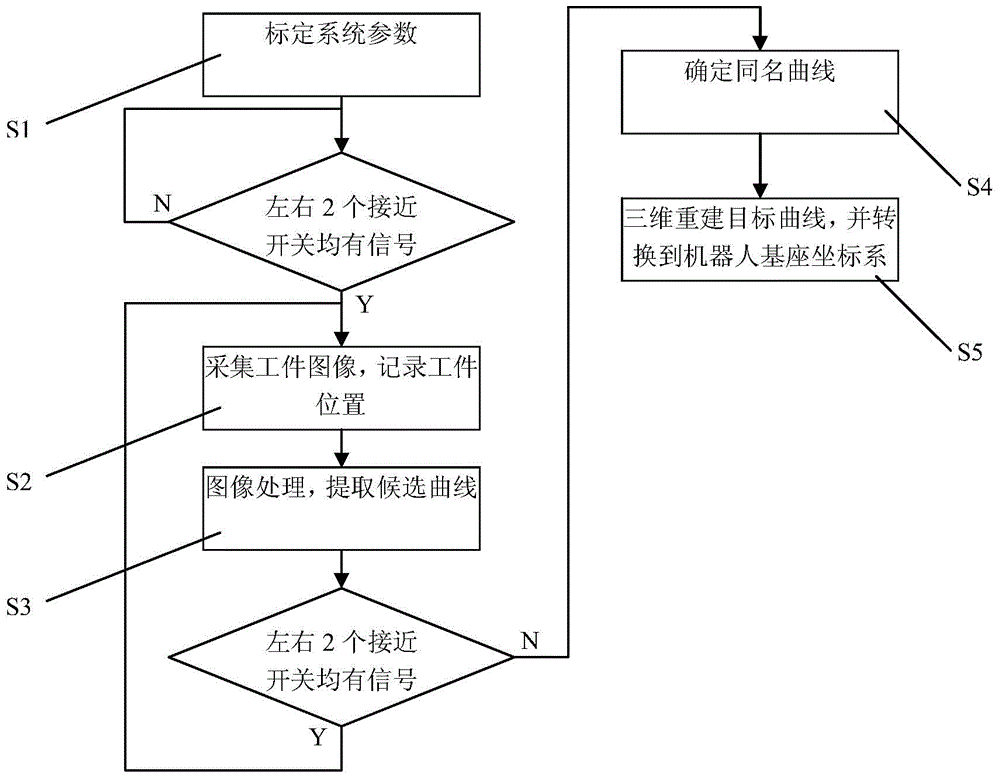
[0051] Reconstructing a cylindrical intersecting line (as shown in Figure 3) includes the following steps:
[0052] Step S1: Collect multiple target images from different angles, apply Zhang Zhengyou’s method to calibrate the camera’s internal parameter matrix K and distortion coefficient, the target used is a chess and card grid; the coordinate point P(x w ,y w ,z w ,1) is mapped to the image coordinate point p(u,v,1) by the following formula:
[0053] λ u v 1 = K [ R | t ] x w y w z ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More