

Group control device and method for multi-robot welding system
A welding system and multi-robot technology, applied in auxiliary devices, welding equipment, auxiliary welding equipment, etc., can solve problems such as low efficiency, and achieve the effects of strong scalability, good fault protection and processing capabilities
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further described below in conjunction with the accompanying drawings.
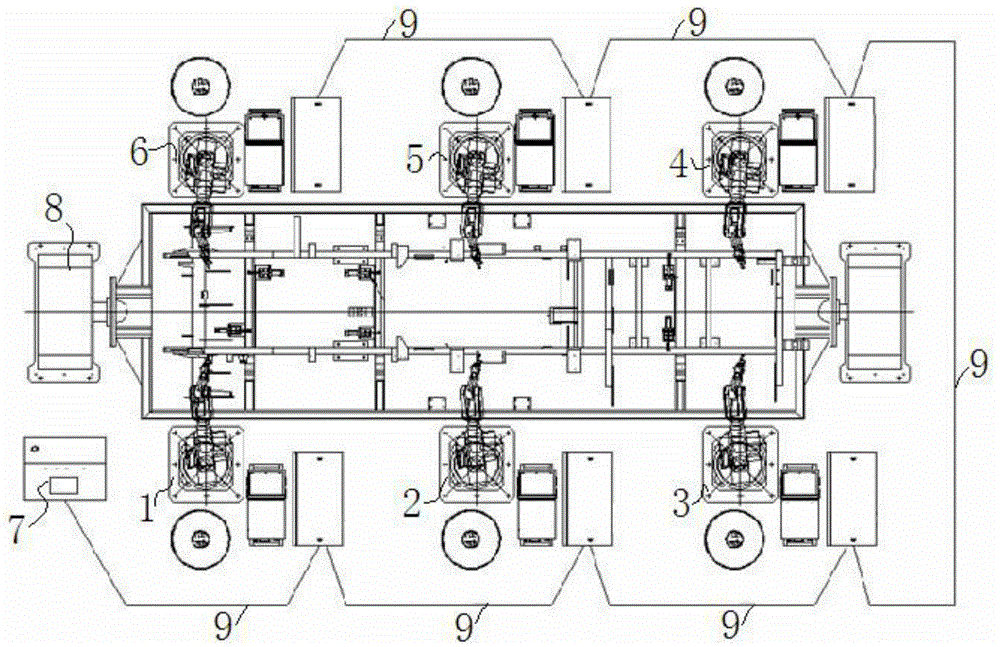
[0025] In a multi-robot welding group control system, such as figure 1 As shown, the PLC electric control cabinet 7 is equipped with a CC-LINK (control and communication link system) master station control module, 6 multifunctional welding robots are distributed on both sides of the workpiece support frame, and the robot control cabinets are equipped with CC-LINK LINK communication card, the master station and each slave station are connected in series according to the figure through the special cable 9 of CC-LINK. The station number of the master station is 0, and the station numbers of each slave station are 1, 5, 9, 13, 17, 21, set the master station and the slave station to have the same communication baud rate, establish a complete CC-LINK link network, and turn on the power to automatically realize the data link. The CC-LINK network is easy to expand. If you nee...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More