

Method for building robot simulation drilling system based on reality scene
A technology for realistic scenarios and simulation exercises, applied in the field of construction of robot simulation and exercise systems, can solve the problems of long modeling cycle, expensive equipment, lack of texture information in 3D reconstruction, and achieve short modeling time, complete geometric model, Geometry consistent effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] In order to make the purpose, technical solution and advantages of the present invention clearer, the technical solution of the present invention will be clearly and completely described below in conjunction with specific embodiments of the present invention and corresponding drawings.
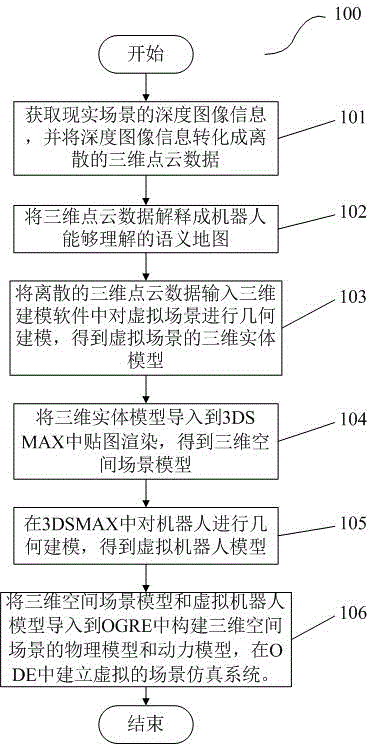
[0019] refer to figure 1 , figure 1 Shown is a flow chart of an embodiment 100 of the construction method of the robot simulation exercise system based on the real scene of the present invention. Embodiment 100 includes steps 101 to 106 as follows.
[0020] In step 101, depth image information of a real scene is obtained, and the depth image information is converted into discrete three-dimensional point cloud data.
[0021] In one embodiment of the present invention, the depth sensor Kinect can be used to obtain the depth image information of the real scene, and the light coding technology (light coding) technology can be used for 3D detection to obtain the depth image information, an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More