Image capture-based Visual Map database construction method and indoor positioning method using database
What is AI technical title?
AI technical title is built by PatSnap AI team. It summarizes the technical point description of the patent document.
An image acquisition and indoor positioning technology, applied in the field of indoor positioning and navigation, can solve the problem of low WLAN positioning accuracy
Active Publication Date: 2015-04-01
严格集团股份有限公司
View PDF4 Cites 13 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
[0003] The present invention aims to solve the problem of low positioning accuracy of WLAN due to the influence of multiple factors such as the opening and closing of doors, people's walking, and walls blocking radio signals indoors, thereby providing a method for establishing a Visual Map database based on image collection and Indoor positioning method using the database
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
specific Embodiment approach 1
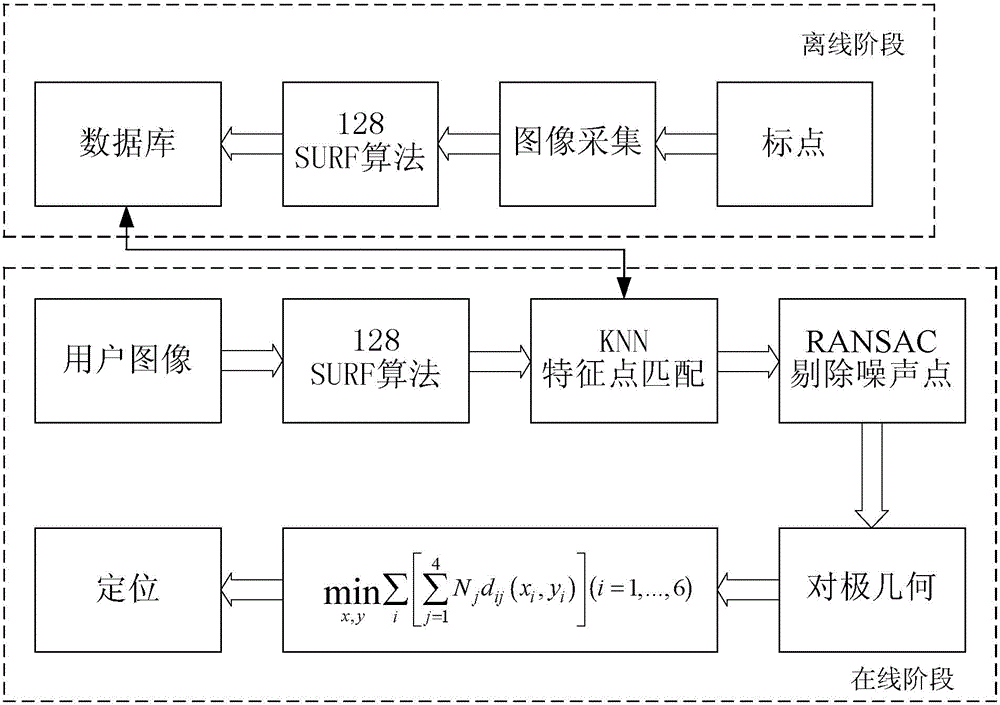
[0071] The specific embodiment one, based on the Visual Map database establishment method of image collection, it comprises the following steps:
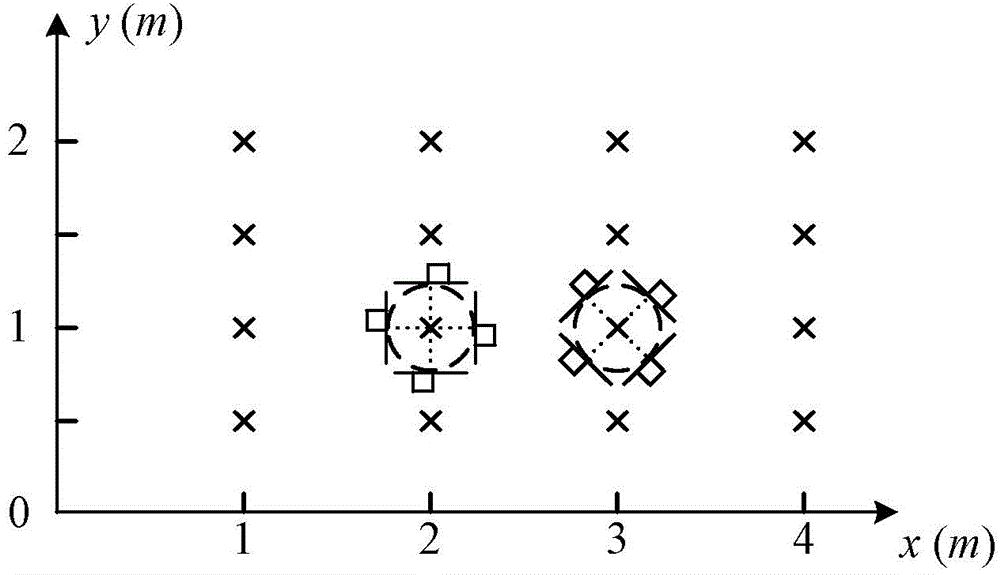
[0072] Step 1: Select the appropriate coordinate origin P according to the indoor environment that needs to be positioned 0 (X 0 ,Y 0 ), establish a two-dimensional Cartesian coordinate system;
[0073] Step 2: Starting from the coordinate origin, establish a reference point every 1 meter along the x-axis, and every 0.5 m along the y-axis, and collect 4 images for each reference point, respectively according to 0°, 90°, 180°, 270° Or 45°, 135°, 225°, 315° for image acquisition at uniform intervals, such as image 3 shown. And calculate the rotation matrix R of the camera when the reference point captures the image r ;
[0074] Step 3: Use the 128-point SURF algorithm to extract feature points from the images collected from 4 angles of each reference point, and correspond to the coordinates of the reference point in the coordin...
specific Embodiment approach 2
[0075] Specific embodiment two, utilize the indoor positioning method of the Visual Map database described in specific embodiment one, it is realized by the following steps:
[0076] Step A, in the online phase, use the 128-point SURF algorithm on the mobile phone to extract the feature point information of the image provided by the location service user, and transmit the feature point to the server;
[0077] Step B. Use the KNN algorithm for the feature points of the image, retrieve the feature points of k images that best match the provided feature points in the server, and record the corresponding position coordinates P(X, Y) and rotation of the k feature points Matrix R r ;
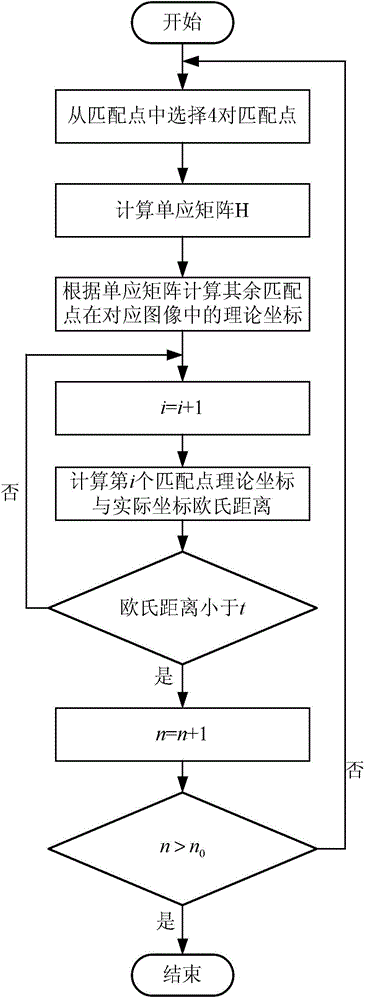
[0078] Step C, using the RANSAC algorithm to eliminate mismatching points between the matched image and the image provided by the user, and improve the positioning accuracy. The algorithm flow chart is shown in FIG. 4 . Where t represents the threshold of the preset Euclidean distance, n represents ...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention discloses an image capture-based Visual Map database construction method and an indoor positioning method using the database, relates to the field of indoor positioning and navigation, and aims at solving the problem of low WLAN positioning precision due to the influence of multiple factors such as door opening and closing, people walking and wall blocking. The indoor positioning method comprises the following steps: establishing an offline Visual Map, extracting feature points of a photo shot by a smartphone of a user to match with the feature points of images on fingerprints at positions in the Visual Map, and precisely estimating the position of the user by using epipolar geometry. The image capture-based Visual Map database construction method and the indoor positioning method using the database are suitable for indoor positioning occasions.
Description
technical field [0001] The invention relates to the field of indoor positioning and navigation. Background technique [0002] With the popularization of smart phones, location-based services are getting more and more attention. Today's satellitepositioning system only solves the problem of outdoor positioning. In an indoor environment, satellite signals will be severely attenuated, resulting in a serious loss of positioning accuracy. In recent years, the indoor positioning method based on WLAN has been extensively studied due to its convenient deployment. However, the current research results show that its positioning accuracy is greatly affected by factors such as the density of people in the room and wall occlusion. The research on vision-based positioning methods began in the field of robot positioning. However, in recent years, with the development of smart phones with cameras and the improvement of mobile phone computing capabilities, vision-based indoor positioning m...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More