High-accuracy target positioning method of unmanned plane on basis of multi-station measurement
A target positioning and UAV technology, applied in the field of high-precision UAV passive target positioning, can solve the problems of high cost, low applicability, unfavorable concealment, etc., to ensure its own safety, wide application range, high The effect of positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
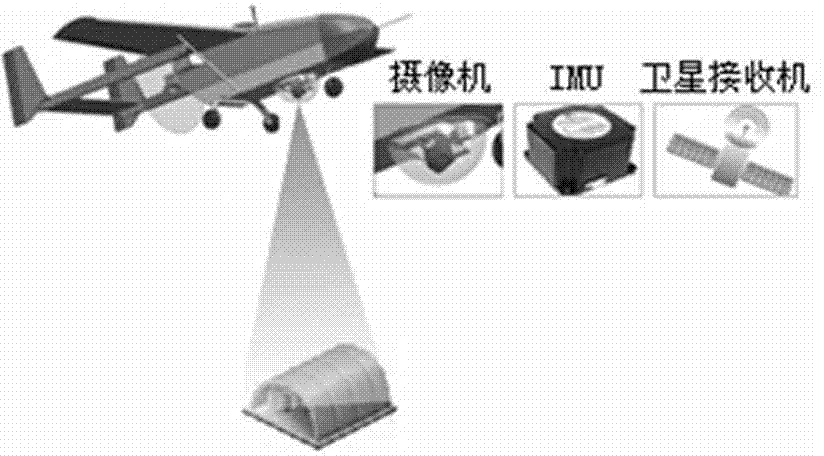
[0022] A high-precision target positioning method for an unmanned aerial vehicle based on multi-station measurement of the present invention includes the following processes:
[0023] The first step is to determine that the UAV is equipped with a satellite receiver, an inertial measurement unit (IMU), a camera pan / tilt, and a camera, of which the camera pan / tilt can achieve two-degree-of-freedom motion (azimuth rotation and elevation rotation).
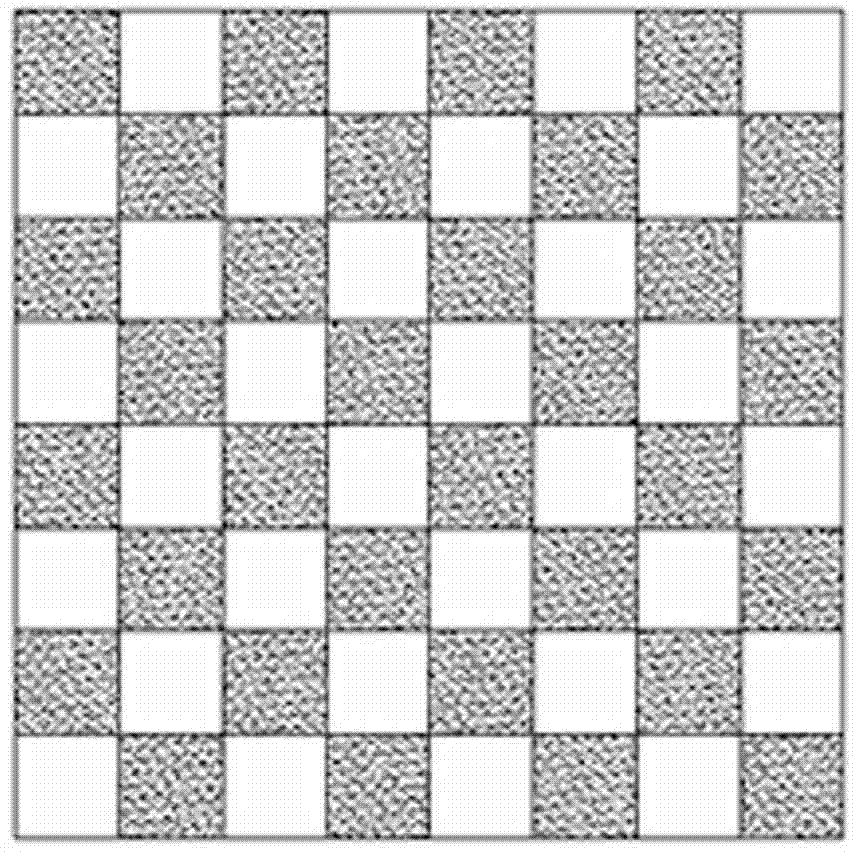
[0024] In the second step, before the drone takes off, the camera calibration method in the present invention is used to determine the internal parameters of the camera.
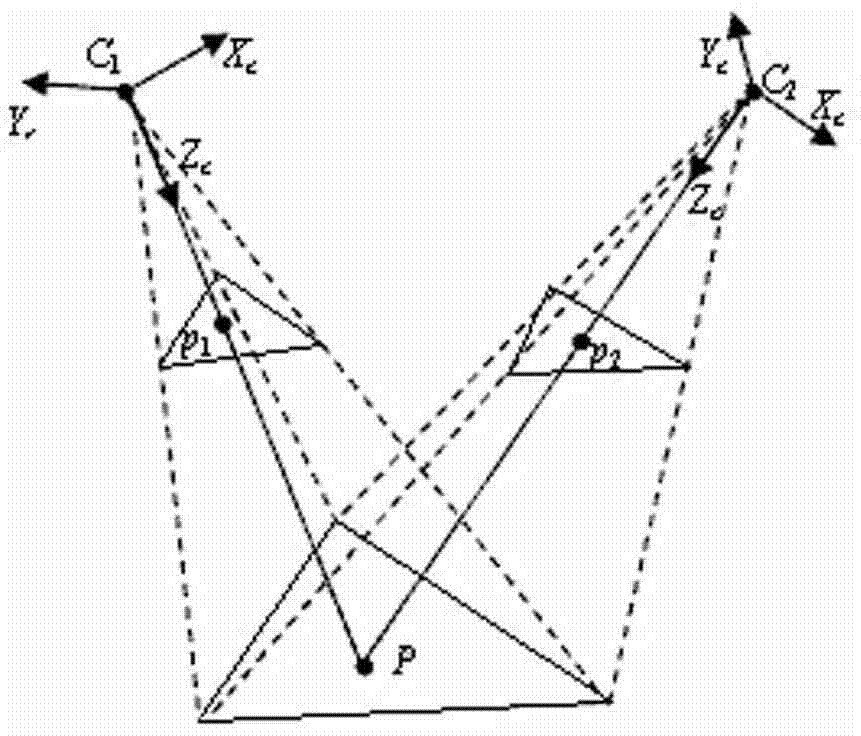
[0025] The third step is to select the target point of interest during the flight of the drone, and adjust the azimuth and elevation angles of the camera's gimbal to ensure that the target point is within the camera's field of view within a certain period of time.
[0026] The fourth step is to extract the coordinates of the point with the same name of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com