

Exoskeleton assistance recovery device
A rehabilitation device and exoskeleton technology, applied in the field of exoskeleton, can solve the problems of large volume and weight motor, complex structure of exoskeleton power transmission part, etc., and achieve the effect of expanded selection range, simple and reliable structure, and large torque
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
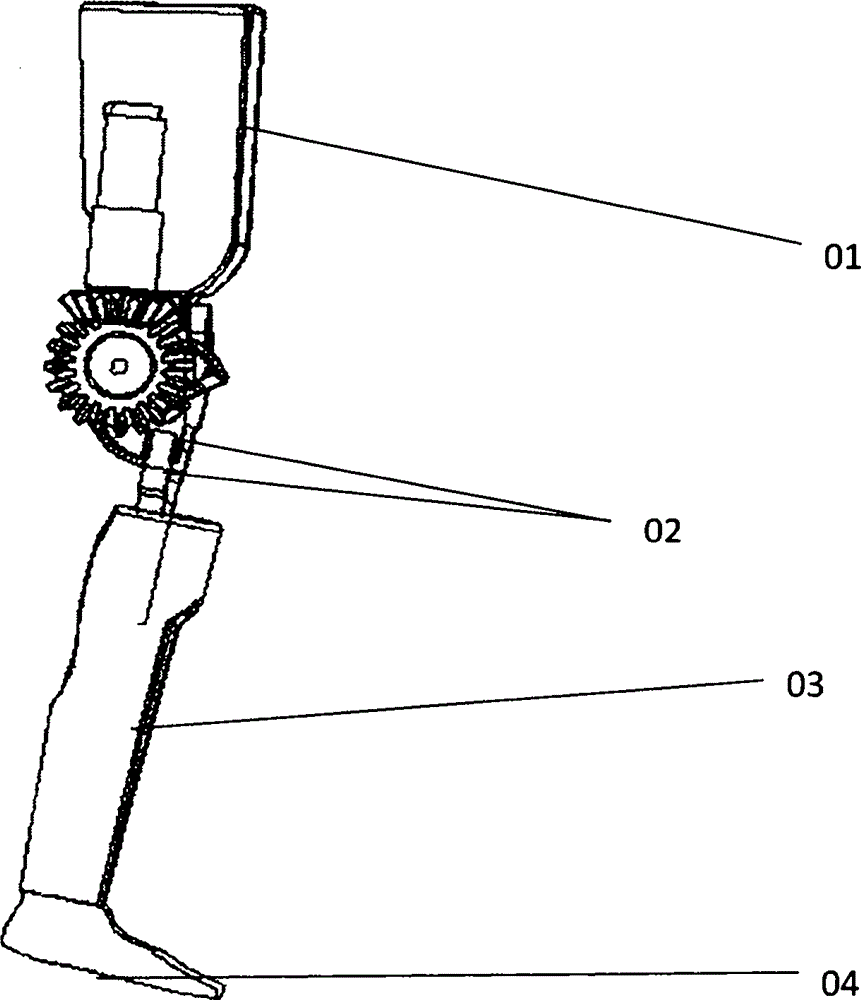
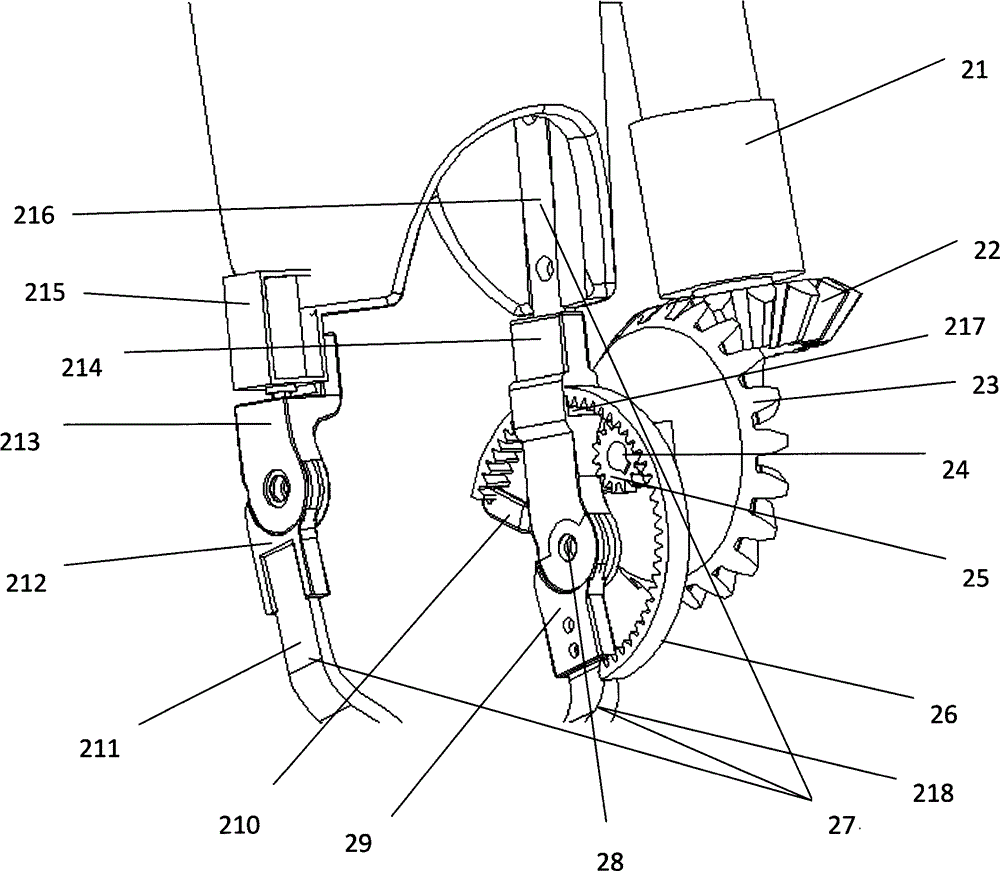
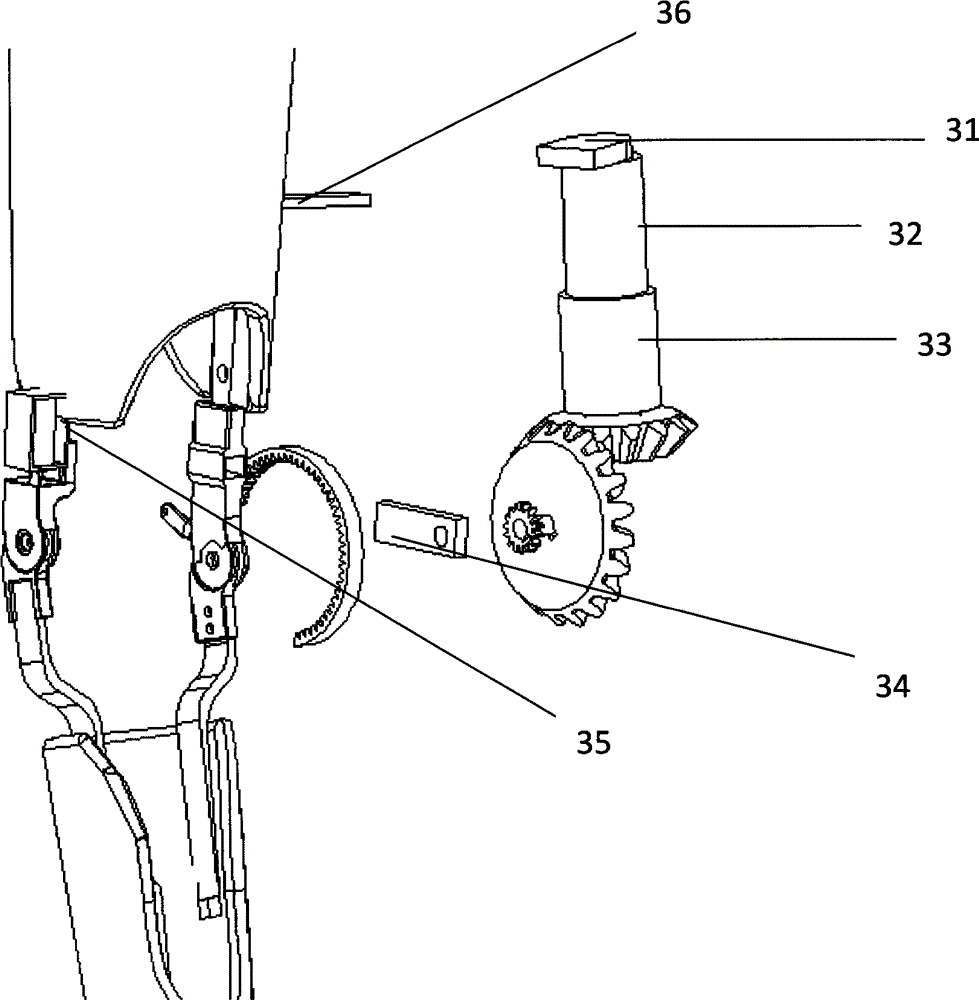
[0011] combine figure 1 , figure 2 , image 3 , Figure 4 Illustrate the specific embodiment of the present invention, this exoskeleton power-assisted rehabilitation device is made up of thigh exoskeleton (11), exoskeleton joint (12), calf exoskeleton (13), foot exoskeleton (14), fixed connection device, power transmission Device, electromagnetic latch (215) form. Described power transmission device comprises DC motor (21), driving bevel gear (22), driven bevel gear (23), power transmission shaft (24), spur gear (25), inner rack (26); (22) meshes with the driven bevel gear (23), the driven bevel gear forms a coaxial rotating device through the transmission shaft (24) and the spur gear (25), and the spur gear (25) and the internal rack (26) mesh with each other . The inner rack (26) lower end and the outer joint lower end part (29) are fixed, and the other end passes through an arc hole (217) on the outer joint upper end part (214) and an end of the muscle (210) is fixed....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More