

Improved auto-disturbance rejection controlling method
A technology of active disturbance rejection control and controller, which is applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem of controller performance degradation, achieve the reduction of observation error, parameter reduction, and control error reduction Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] Embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
[0026] Suppose the control object of the system can be described as:
[0027] x · 1 = x 2
[0028] x · 2 = ax 2 + bu + f
[0029] y=x 1
[0030] where x 1 Represents the position signal of the system, namely θ; x 2 Represents the speed signal of the system; f represents the disturbance signal received by the system. a and b respectively represent the physical parameters of the system itself. The specific design process of the improved ADRC method will be introduced below.
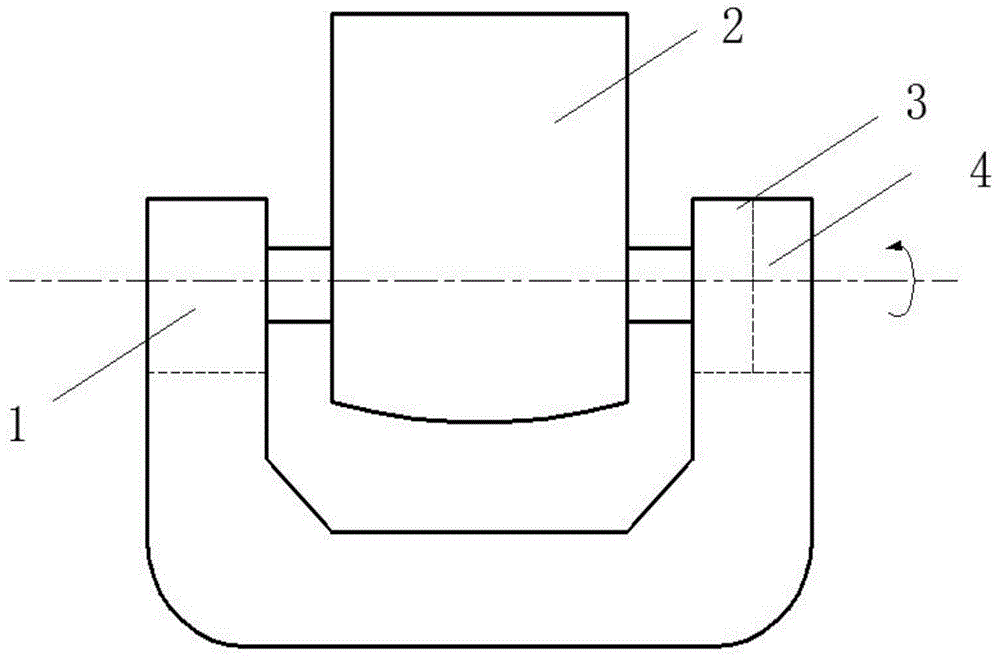
[0031] Step (1): The servo system consists of figure 1 The photoelectric tracking system shown is c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More