

Palletizer provided with ten-rod four-freedom-degree controllable mechanism type moving mechanical arm
A mobile robot arm and mechanism-based technology, which is applied in the direction of program-controlled manipulators, manipulators, and object stacking, can solve problems such as difficult to meet high-speed heavy-load handling and stacking, heavy robot arms, and accumulation of joint errors, etc., to achieve increased Effects on range of motion, reduced own weight, improved accuracy and speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
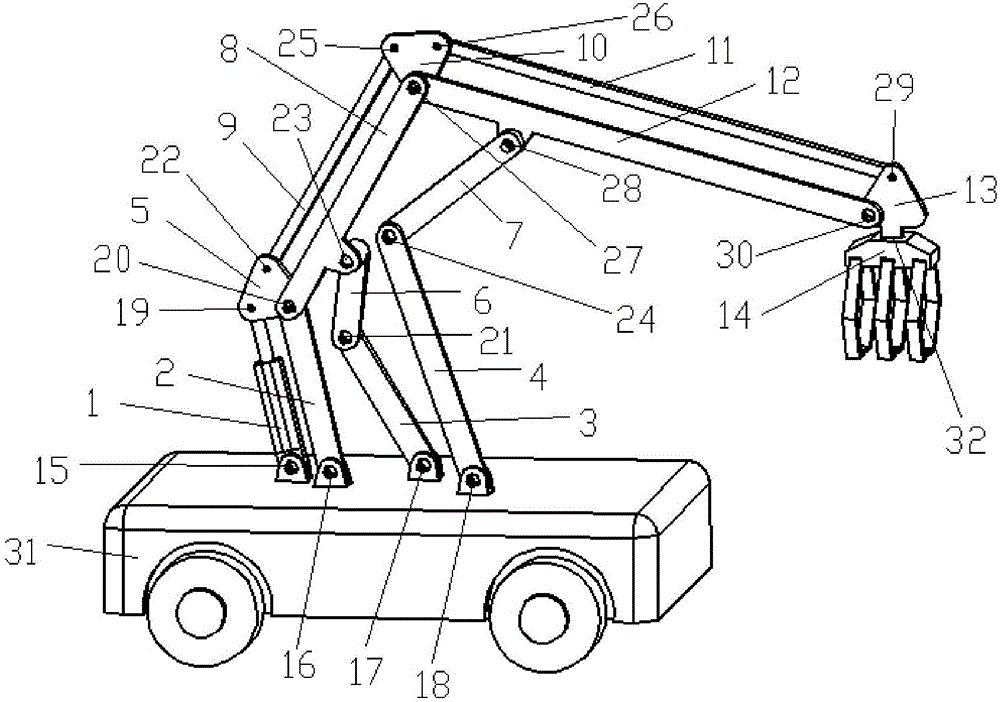
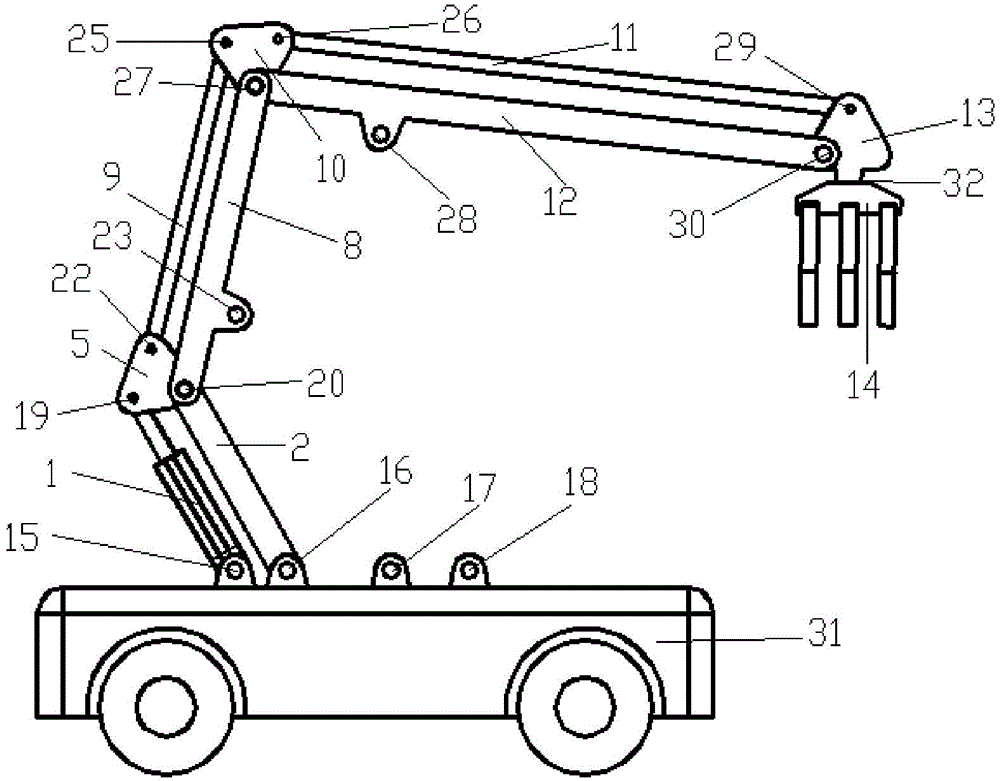
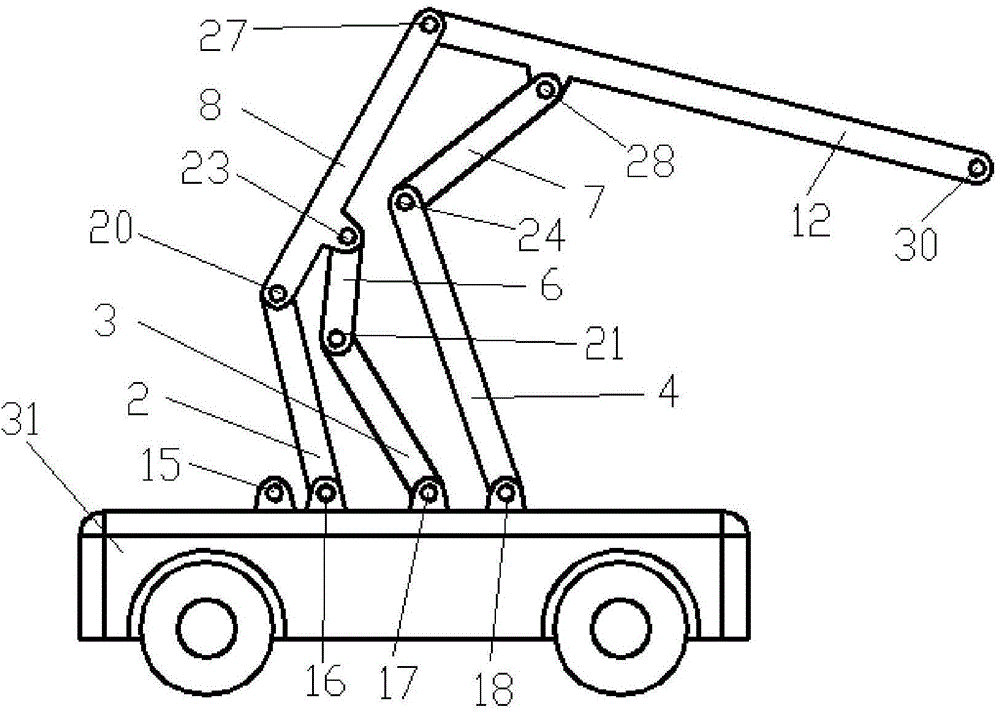
[0027] control figure 1 , the palletizing of the ten-rod four-degree-of-freedom controllable mechanism mobile robot arm described in the present invention includes a mobile operating platform 31, a linear drive 1, a first active rod 2, a second active rod 3, and a third active rod 4 , the first support frame 5, the second support frame 10, the third support frame 13, the first tie rod 9, the second tie rod 11, the first connecting rod 8, the second connecting rod 6, the third connecting rod 12, the fourth connecting rod Rod 7, gripper 14 and three servo motors.
[0028] control figure 1 and figure 2 , the first active rod 2 is connected to the mobile operating platform 31 through the second rotating pair 16, the linear drive 1 is connected to the mobile operating platform 31 through the first rotating pair 15, and the other end of the first active rod 2 is connected through the sixth rotating pair 20 It is connected with the first support frame 5 , and the other end of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More