

Flexible arm system two-dimensional vibration control method
A flexible arm and flexible robotic arm technology, applied in the field of two-dimensional vibration control of flexible arm systems, can solve problems such as slow response speed, low load-to-weight ratio, and high energy consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
[0053] Such as figure 1 As shown, the operating relationship between modules of a two-dimensional vibration control simulation method for a flexible arm system includes the following steps:
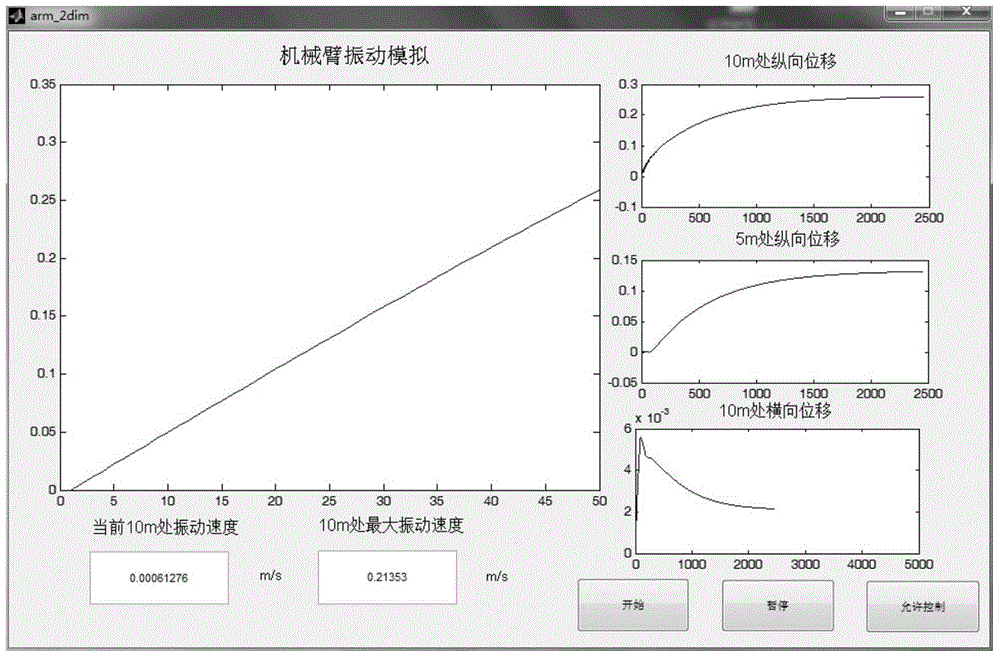
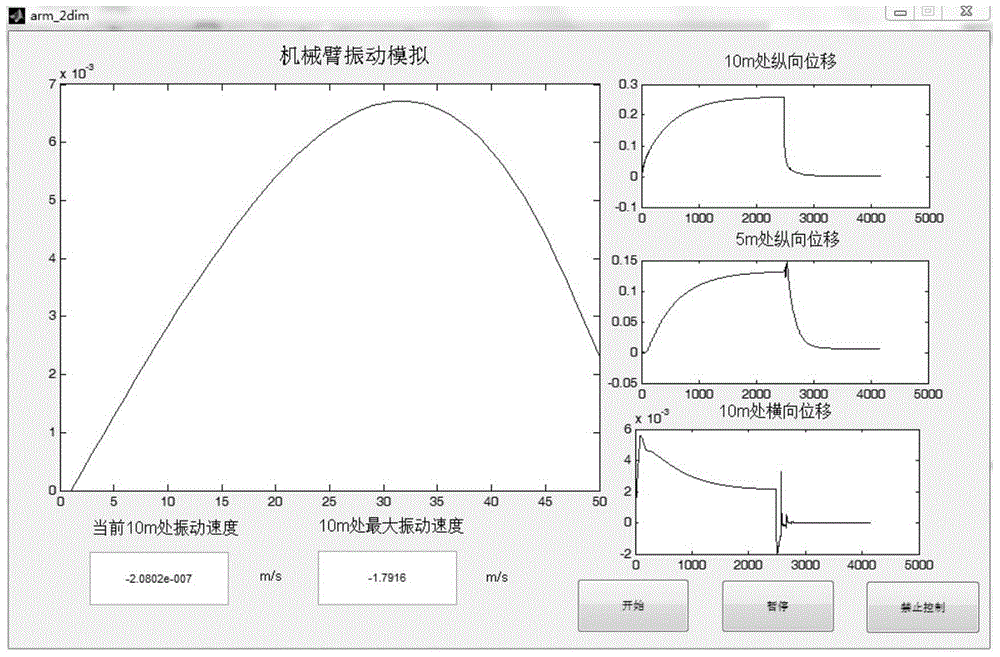
[0054] S1. Establish a flexible mechanical arm vibration simulation visual operation interface through Matlab GUI programming;
[0055] S1.1, PDEs equation analysis, using the difference discretization method to discretize the partial differential equation, using the backward difference method to obtain w′(x,t) and Then use Matlab for numerical calculation;
[0056] S1.2. In order to achieve the real-time display effect of the vibration of the flexible manipulator and the iterative characteristics of the fourth-order operation of the flexible manipulator equation, the data is discretely processed, and only 7 time discrete points are calculated at a time to ensure the matching of the calculation speed and the drawing speed. At the same time, it also takes into account the time causal da...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More