

Night preceding vehicle detection method based on millimeter-wave radar and machine vision
A technology of millimeter-wave radar and vehicles in front, which is applied in radio wave measurement systems, radio wave reflection/reradiation, instruments, etc., and can solve problems such as complex algorithms, short working distance of vehicle detection methods, and easy drift
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
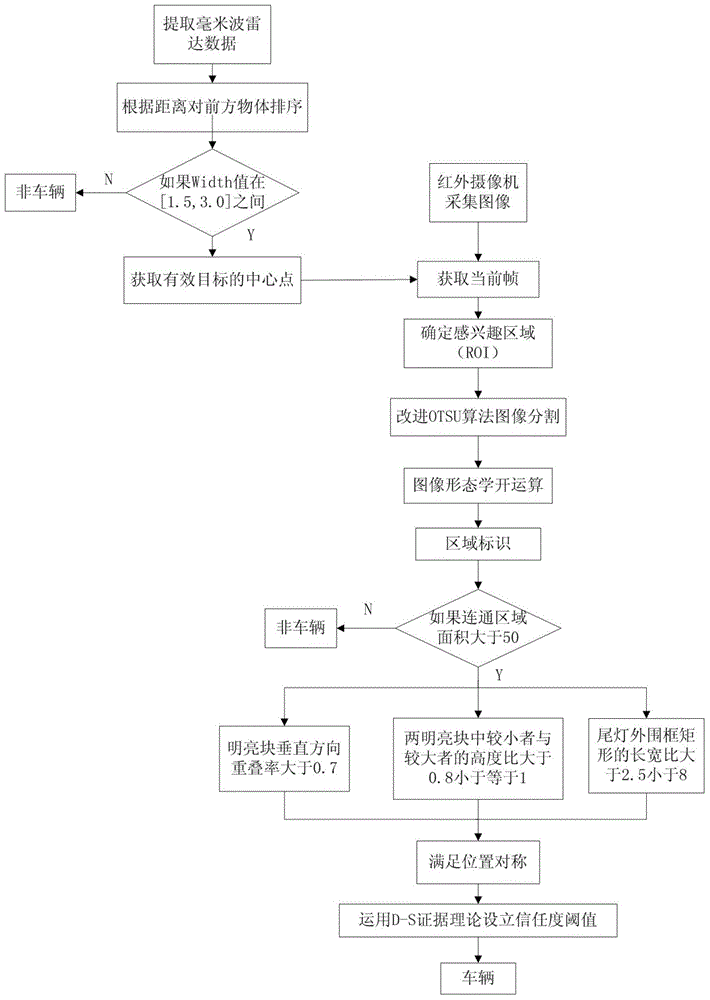
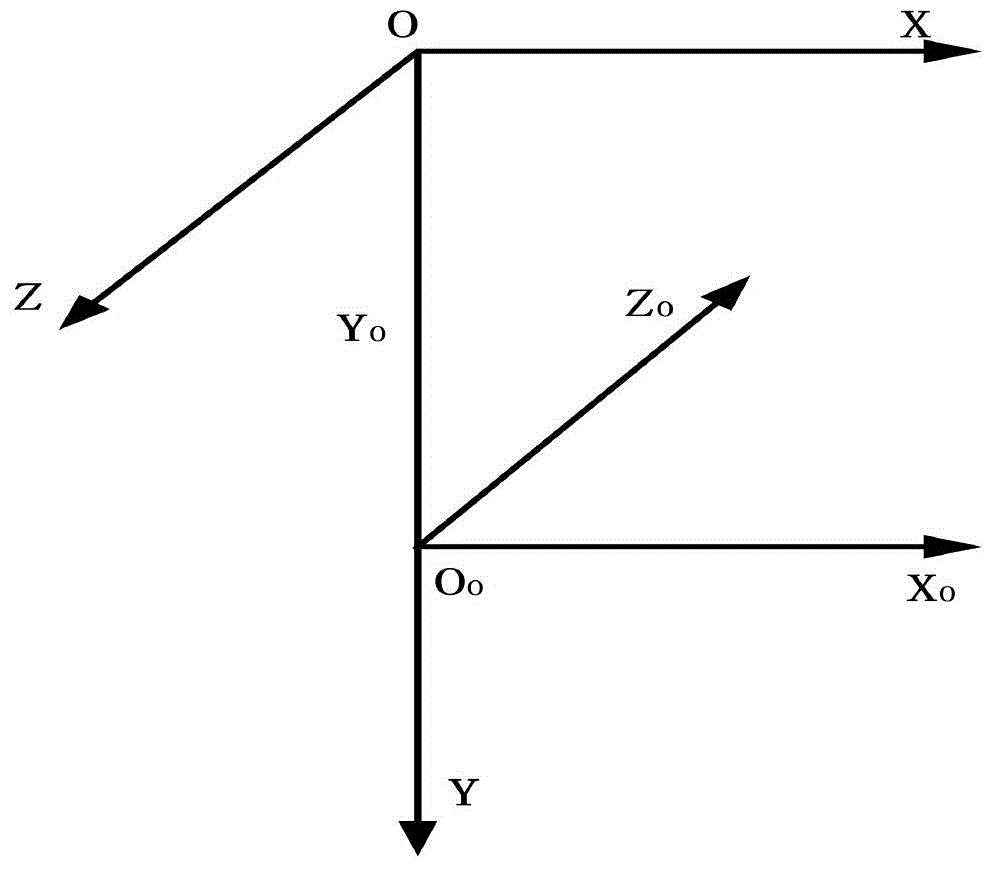
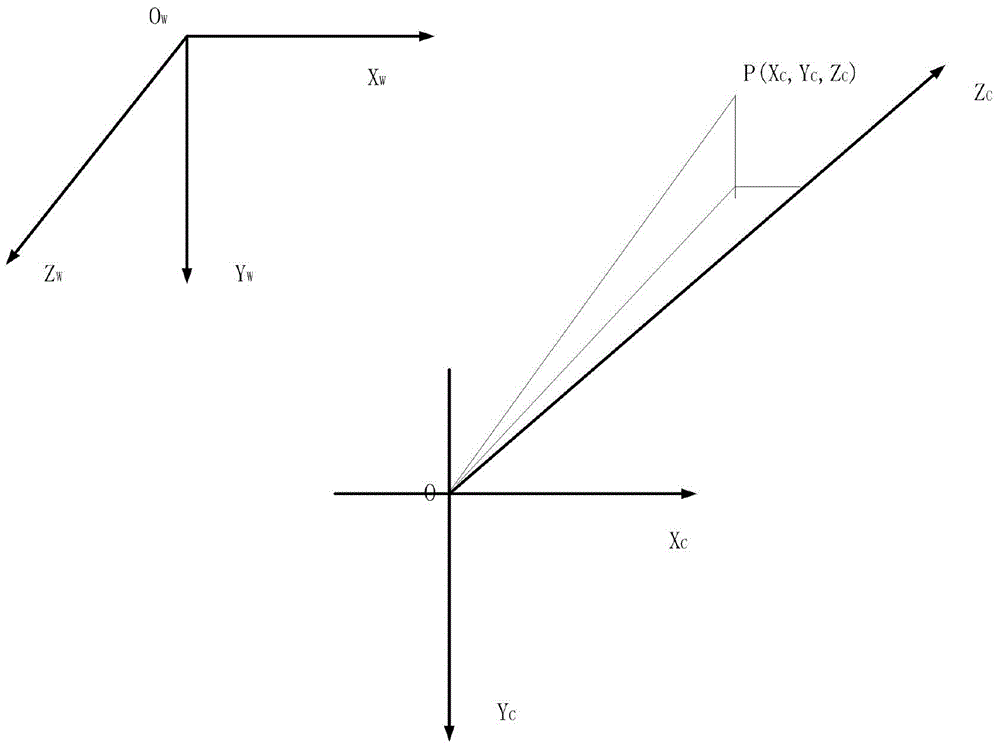
[0059] The present invention proposes a nighttime front vehicle detection method based on millimeter-wave radar and machine vision. The present invention first obtains the projection matrix of world coordinates and image pixel coordinates, establishes a conversion relationship between the radar coordinate system and the image pixel coordinate system, and then Obtain the distance, width, reflectivity, relative speed and other information of the obstacles in front through the millimeter-wave radar, and then eliminate the false targets and determine the effective targets according to the width information to preliminarily distinguish the vehicles in front, and then project the radar scanning points under the radar coordinate system to the image Pixel coordinate system, according to the pixel coordinates of the projected point image and the width and distance information of the vehicle in front, the ROI of the region of interest is established on the image, and finally the character...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More