

Rapid and comprehensive tunnel measurement system
A comprehensive measurement and tunneling technology, applied in the direction of measuring devices, optical radiation measurement, material defect testing, etc., can solve the problems that have not been applied in the market, low detection speed, low practicability, etc., achieve good safety and improve detection accuracy , the effect of improving the detection efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
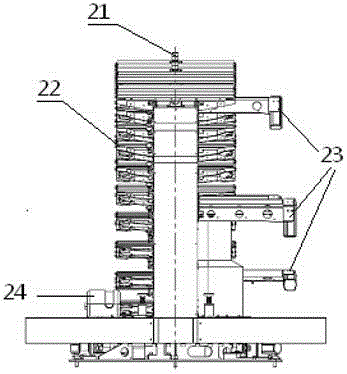
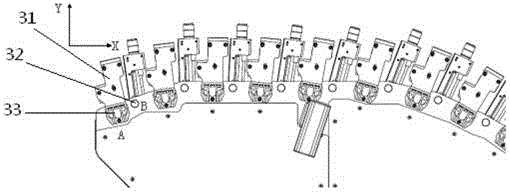
[0044] Such as figure 1 As shown, this system is a vehicle-mounted comprehensive detection system, including chassis vehicle 1, strobe indicator light 2, sub-frame 3, power wall box, sliding shelter 5, front fixed retaining wall 6, working area cabin 7, working Area large cabin 8, accessory box 9, distance measuring machine 10, oil engine door 11, such as figure 2 As shown, the sensor bracket is installed in the sliding shelter 5. The chassis vehicle is the mobile measurement platform of the system, which provides a vehicle-carrying platform for each equipment of the tunnel measurement system. Chassis 1 is a light truck with large traction and good maneuverability. The whole vehicle adopts an air spring shock absorption system to ensure the safety and stability of the equipment. The synchronization and signal processing device is installed in the small cabin 7 of the work area, and the data acquisition and processing device and the power supply device are installed in the l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More