

Method for fully-automatic water transportation of robot and water transporting robot system
A robot and fully automatic technology, applied in the field of intelligent robots, can solve problems such as inability to accurately control the robot's driving, easy to rush out of the road, and the robot's easy to run out of the road
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] The present invention will be further described below in conjunction with embodiment, but protection scope of the present invention is not limited to this:
[0074] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
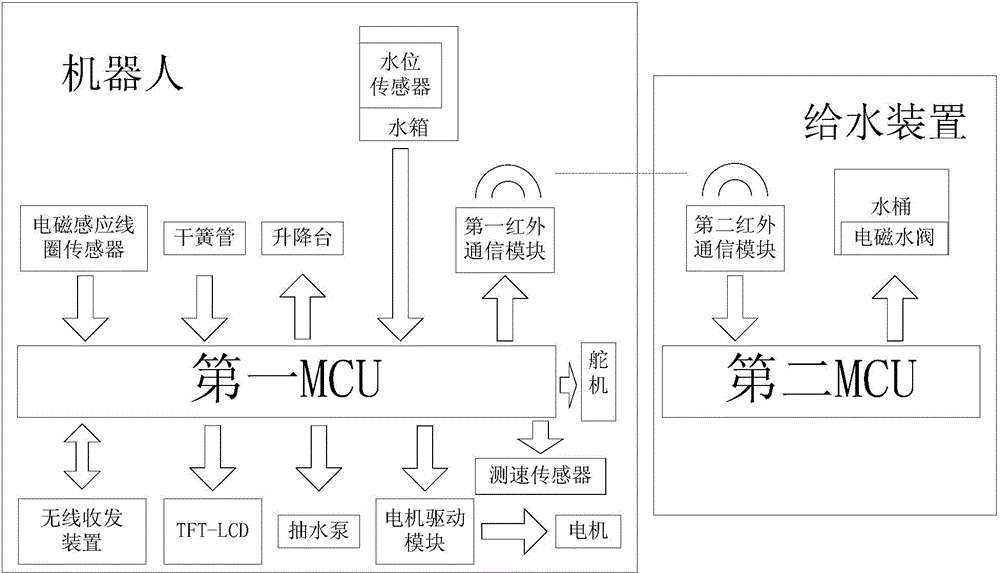
[0075] Such as figure 1 Shown, the water delivery robot system of the present invention, it comprises robot, the road that robot walks, water supply device;
[0076] The robot includes the robot body and the lifting platform arranged on it, water pump, motor, motor drive module, steering gear (model can be FUTABA3010), water tank, water level sensor, first MCU (model can be STM32F407ZE), reed switch, wireless Transceiver device, electromagnetic induction coil sensor, speed measuring sensor and the first infrared communication module, described motor is divided into the water pump motor (model can be self-priming micro-submersible pump) of control water pump, the lifting table motor of contr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More