

Omni-directional automatic forklift and 3D stereoscopic vision navigating and positioning method
A technology of navigation positioning and stereo vision, which is applied in the field of forklifts, can solve the problems of large limitations, obstacles that cannot be better avoided, navigation performance stability and accuracy, etc., and achieve the effect of zero turning radius
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be described in further detail below through specific embodiments and in conjunction with the accompanying drawings.
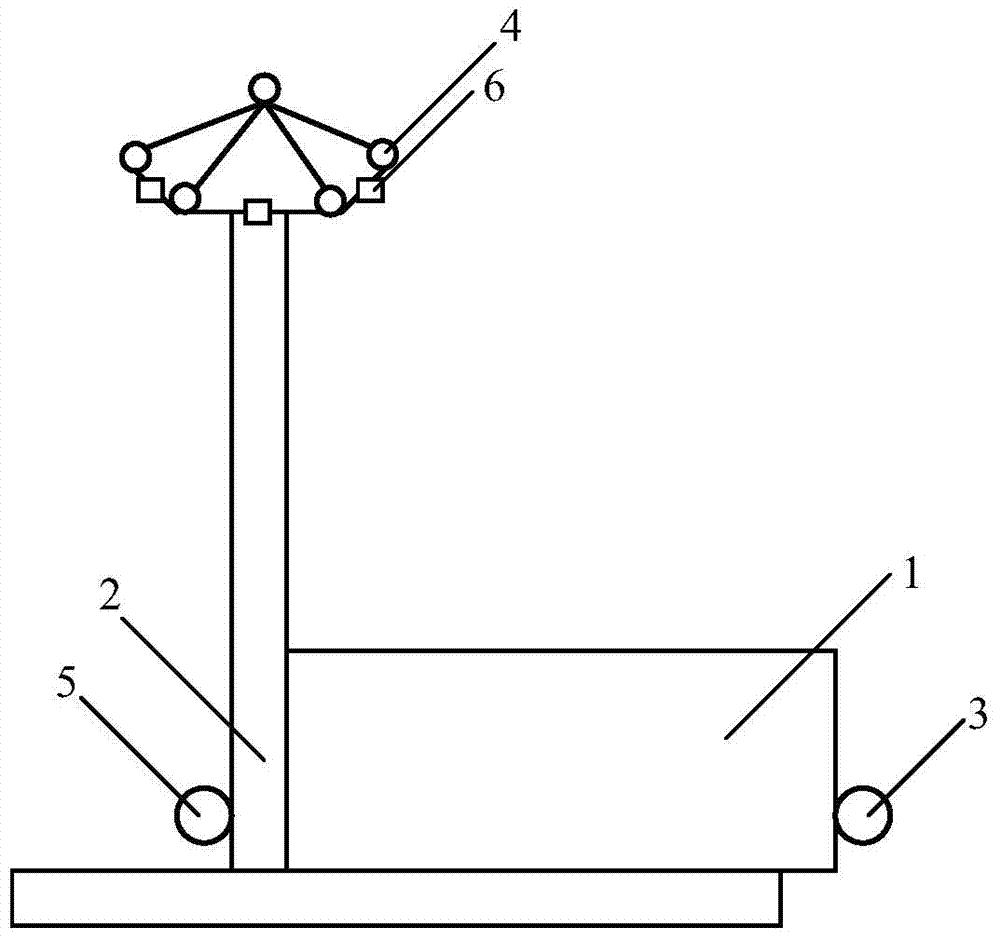
[0040] Such as figure 1 Shown, a kind of omnidirectional automatic forklift described in the embodiment of the present invention, this automatic forklift comprises:
[0041] A moving car body with four mecanum wheels installed on the chassis, including a support structure 1, a laser radar 3 installed on the support structure 1 close to the ground, and a battery installed in the support structure 1, a DC motor, a control device, Central processing unit, image processing device, inertial measurement device, odometer, wireless device;
[0042] The forklift lifting device includes a lifting structure 2, five binocular stereo vision cameras 4 installed on the top pallet of the forklift lifting structure 2, a front camera 5 installed at the bottom of the lifting structure 2, and front and rear cameras installed on the top of the li...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More