

Indoor positioning method based on particle filtering under condition of non-Gaussian noises
A non-Gaussian noise and particle filter technology, applied in positioning, radio wave measurement systems, measurement devices, etc., can solve the problems that the optimal density function cannot be directly obtained, and the efficiency and accuracy of calculation cannot be guaranteed, so as to improve calculation efficiency and Accuracy, improvement of degradation phenomenon, and effect of reducing dependence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further explained below in conjunction with the accompanying drawings and specific embodiments.
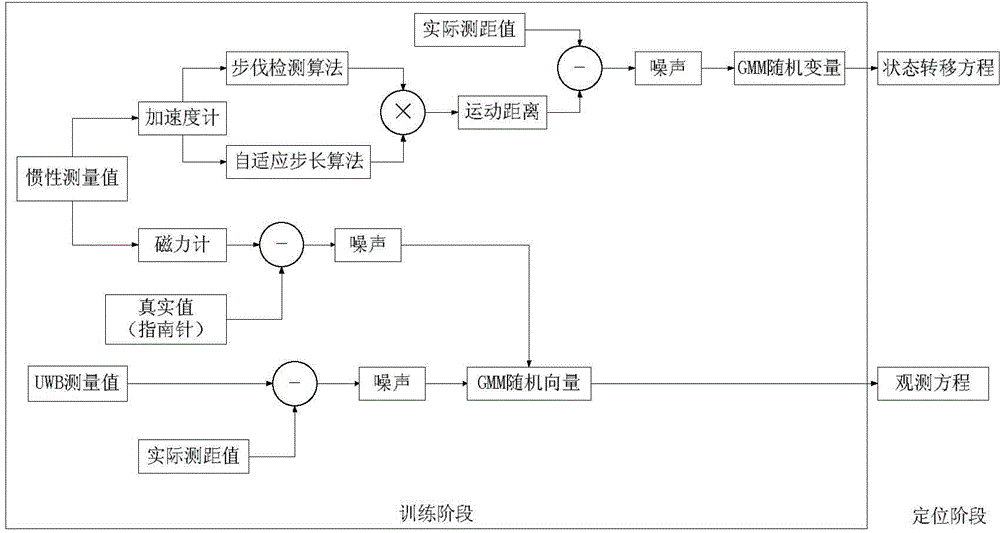
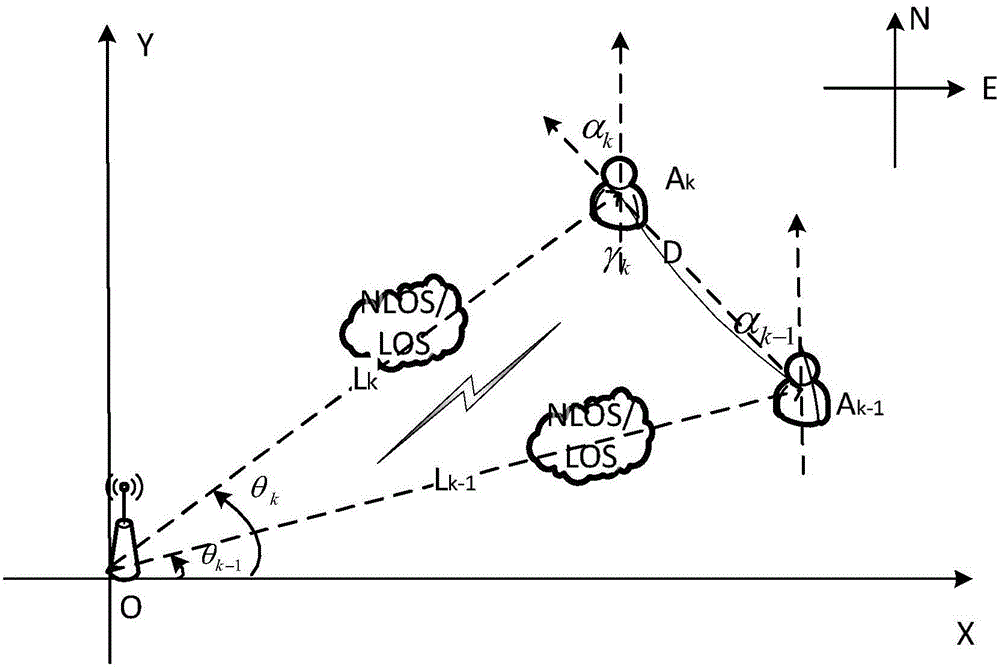
[0025] Such as Figure 1-2 As shown, a particle filter-based indoor positioning method under non-Gaussian noise conditions uses a single ultra-wideband (UWB) anchor node to locate a single user. In this method, the acceleration in the state equation and the measurement noise in the observation equation are modeled as mixed Gaussian random variables, and the observation equation is locally linearized to obtain the suboptimal importance function, and then particle filtering is performed to obtain the state quantity Optimal estimation, the specific steps of the method:
[0026] (1) Establish the state equation and observation equation of the moving target motion, approximate the probability distribution of the acceleration vector in the state equation through a mixed Gaussian distribution, and use the mixed Gaussian distribution to approximate th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More