

Intersection point judgment based trilateral locating method
A technology of three-sided positioning and intersection point, which is applied in industry, sensor node to tag node positioning, military, commercial and indoor positioning, and agricultural fields. It can solve problems such as large positioning errors and failure to meet positioning accuracy requirements, and achieve good fault tolerance Easy-to-implement, simple-to-calculate effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be described in detail below in conjunction with specific examples.
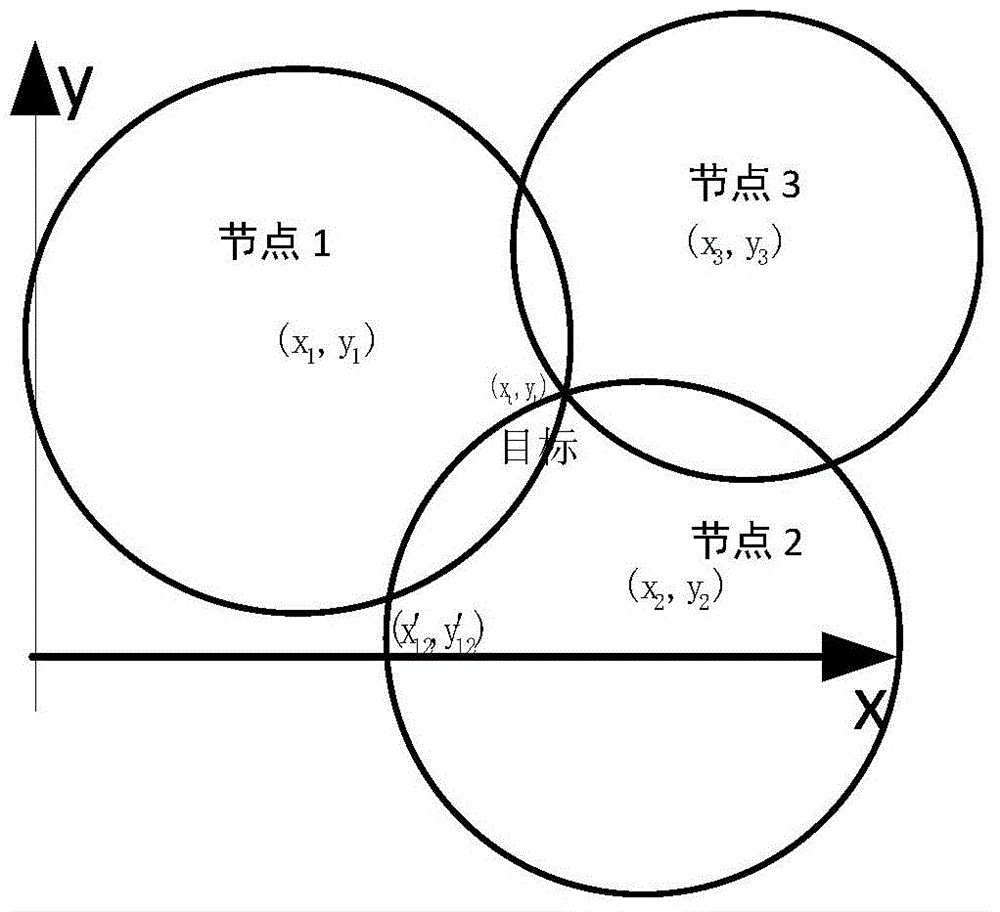
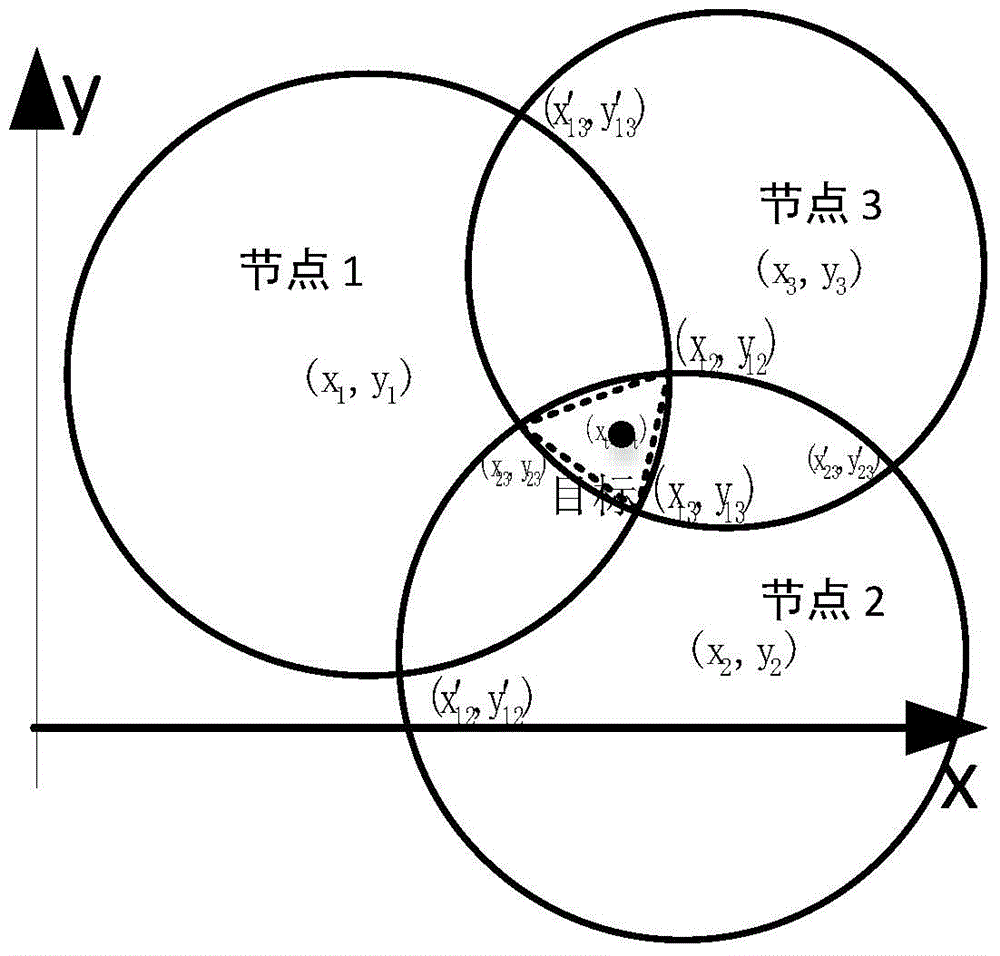
[0026] When the label node (target) positioning function is started, the label node sends out a request; after receiving the request from the label node, the spatially deployed anchor node immediately sends an ultra-wideband pulse signal to the label node; the label node receives the ultra-wideband pulse signal from the anchor node. Immediately after the broadband pulse signal, the ultra-wideband pulse signal is sent back to the anchor node; the anchor node calculates the time-of-flight ToF of the signal, thereby calculating the distance d from the label node i , and stored in the hardware register; the anchor node will assign itself ID number i, distance d i and location information (x i ,y i ) (i=1, 2, ...) is sent to the gateway; the gateway uses the trilateration positioning method proposed by the present invention to calculate the position of the label node with the r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More