

Instrument for robot-assisted micro-invasive surgery
A robot-assisted, minimally invasive surgery technology, applied in the field of surgical tools for minimally invasive surgical robots, can solve the problems of unfavorable insertion of poking cards into the human body, fixed opening and closing angles, and lack of flexibility, etc., to achieve simple and reliable driving methods, Adjustable opening and closing angle, stable and reliable transmission
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
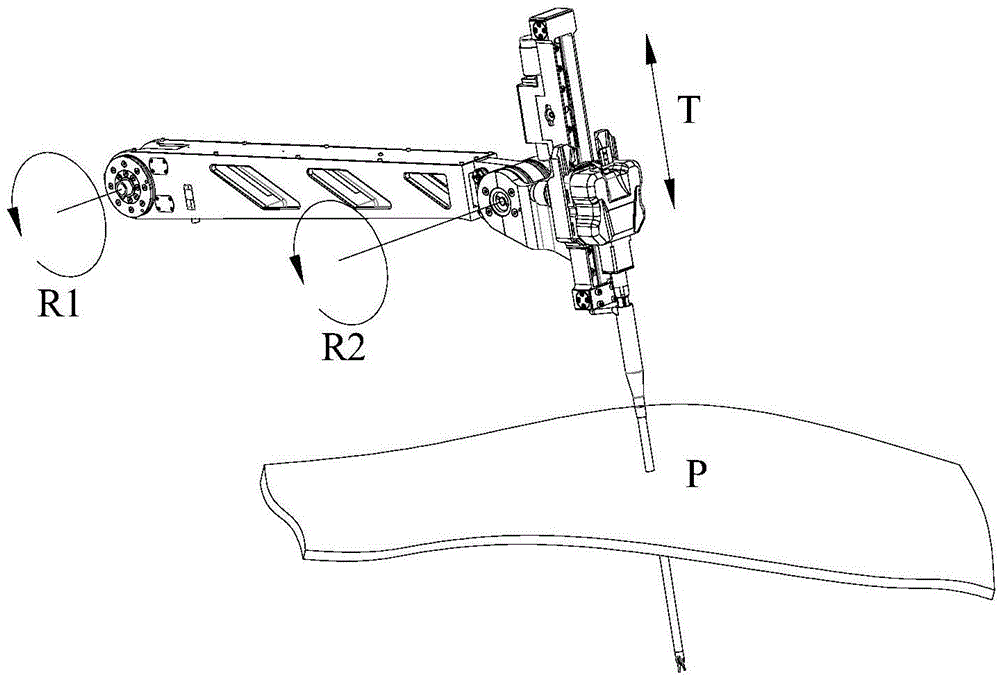
[0022] A robot-assisted minimally invasive surgical instrument of the present invention will be described in detail below in conjunction with the accompanying drawings.
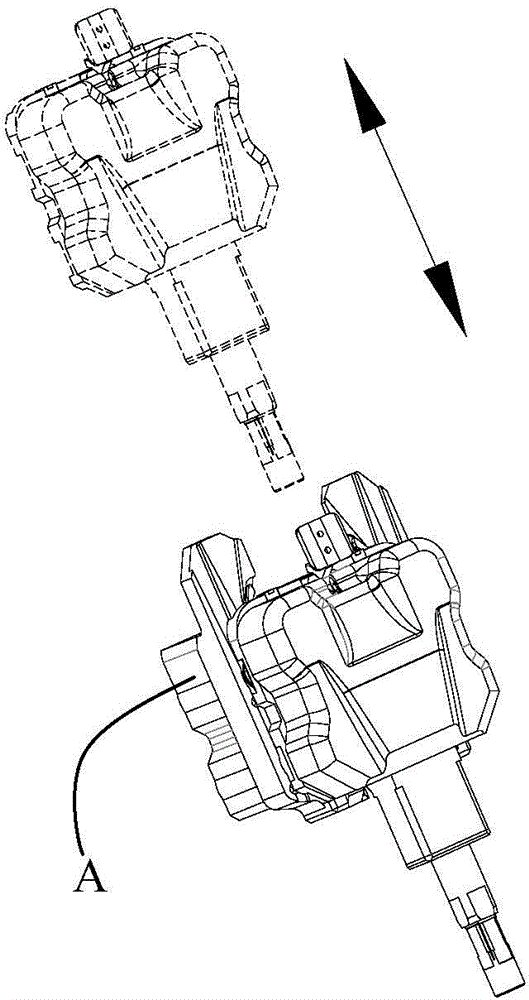
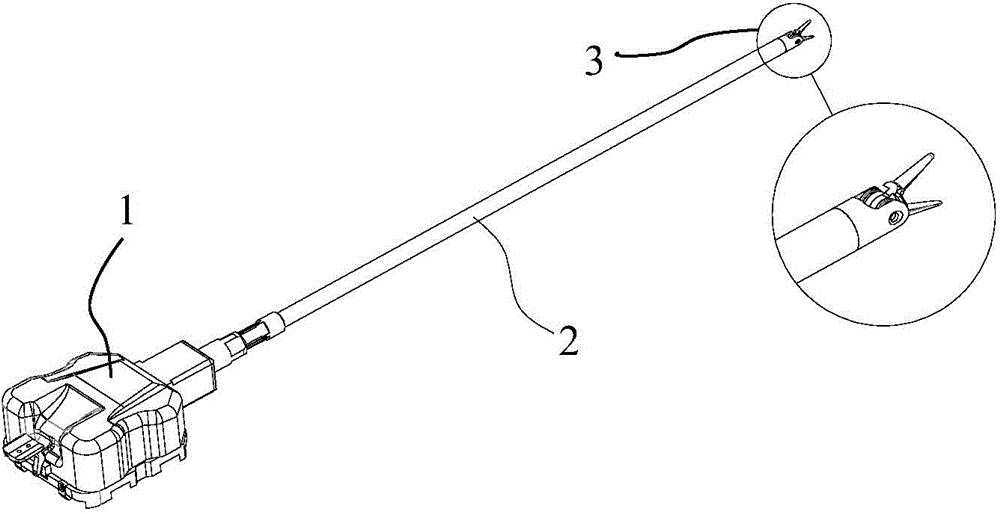
[0023] A robot-assisted minimally invasive surgical instrument of the present invention comprises a driving device 1 connected in sequence, a connecting catheter 2 and an end effector 3, the driving device includes a base 1-1, and the base Three transmission shafts 1-2 arranged parallel to each other are installed on the top through bearing rotation, and the three transmission shafts are vertically arranged with the base, and a wire wheel and a holding block 1-4 are fixedly set on each transmission shaft ; The rear end of the connecting conduit 2 is mounted on the base 1-1 through bearing rotation, and the rotation axis of the connecting conduit 2 is arranged perpendicular to the axes of the three transmission shafts; the end effector includes a clamp seat 3-3 and the opening and closing pliers composed of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More