

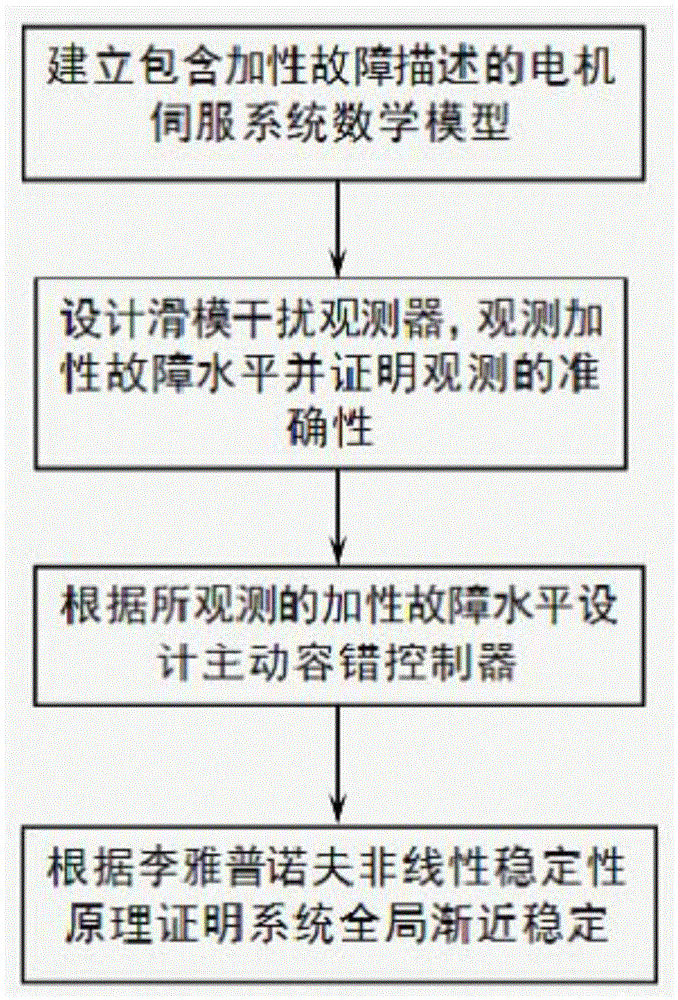
Motor servo system additivity fault detection and fault tolerant control method based on slip form
A servo system and fault-tolerant control technology, applied in electrical testing/monitoring, general control systems, control/regulation systems, etc., can solve problems such as large data processing volume, low false alarm rate, fault characteristics, and cause ambiguity. Achieve the effects of ensuring system safety, restoring control performance, and offsetting adverse effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
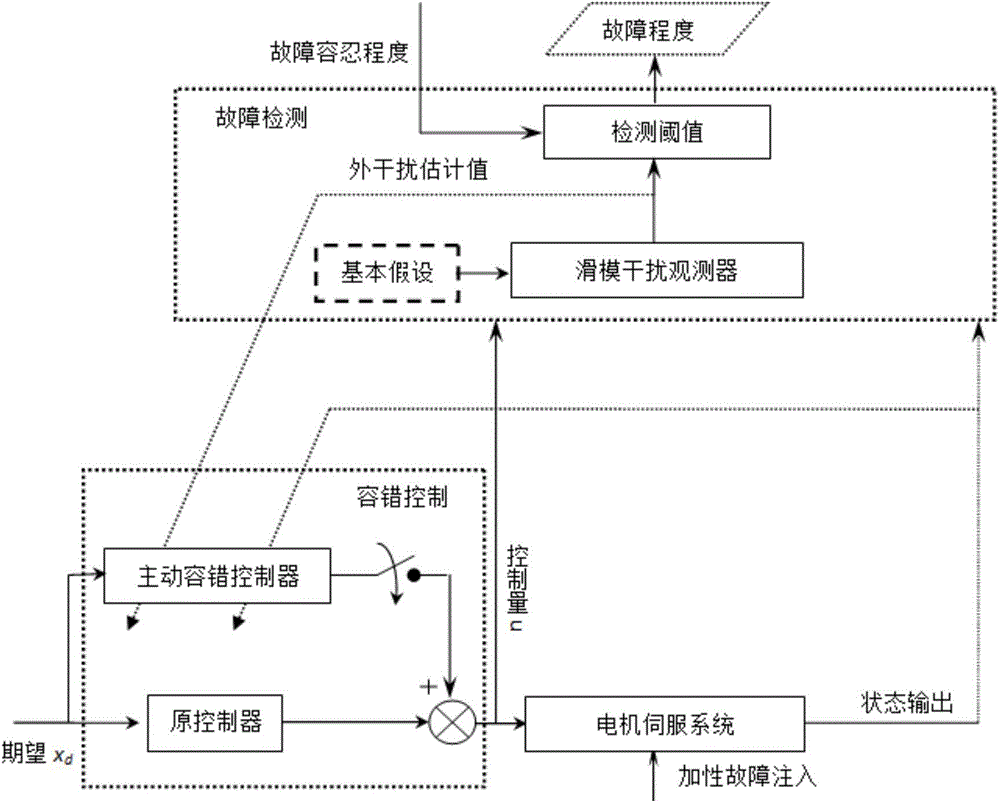
Method used
Image

Examples
Embodiment
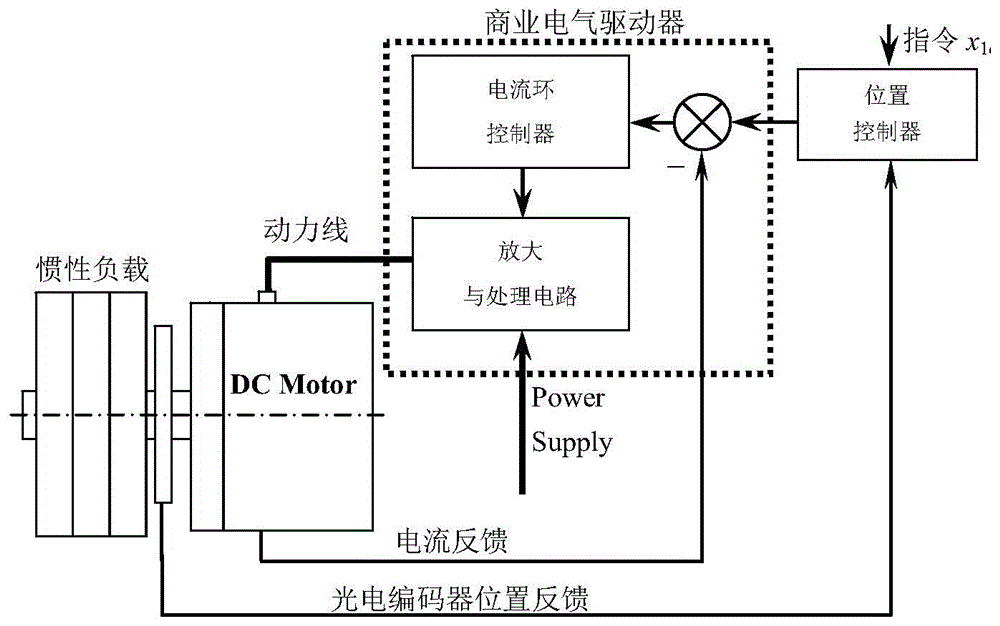
[0105] In order to assess the performance of the designed controller, the following parameters are taken in the simulation to model the motor servo system:
[0106] Inertia load parameter m=0.0138kg m 2 ; Viscous friction coefficient B = 0.2N m s / rad; Moment amplification factor k u =53.6N·m / V;
[0107] Sliding mode disturbance observer parameters: k 1 =5000, β 1 =30,ε 1 =0.05,p 1 = 3 and q 1 = 5;
[0108] Active fault-tolerant controller parameters: c 1 =512,c 2 =192, κ 1 =0.0005, κ 2 = 0.001, α = 0.5;
[0109] Original controller parameters: c 1 =512,c 2 =192;
[0110] The desired instruction for a given system is: x d =8sin(t)[1-exp(-0.01t 3 )](rad);
[0111] According to 4 different system working conditions, the simulation analyzes the no-fault situation and 3 types of typical additive faults: sudden faults, early small-amplitude faults and tolerable micro-faults, and the simulation process is divided into 4 parts:
[0112] (1) No-fault condition: In the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More