Wall-climbing robot with wall surface polishing function
A wall-climbing robot and wall surface technology, applied in the field of wall-climbing robots, can solve the problems of low grinding efficiency and achieve the effects of simple structure, low weight and flexible control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
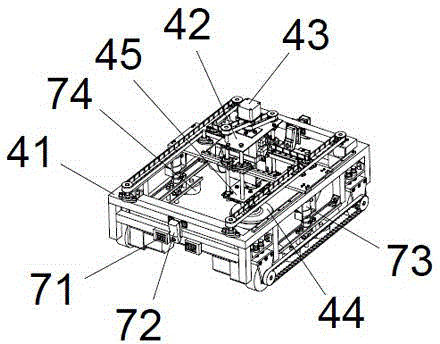
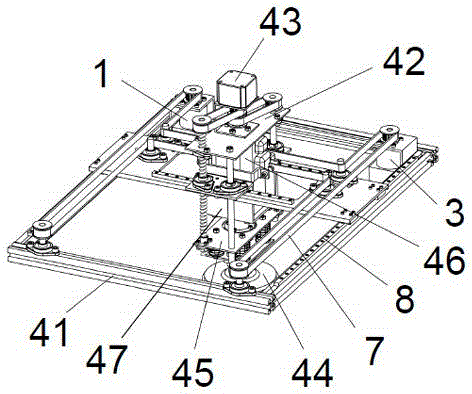
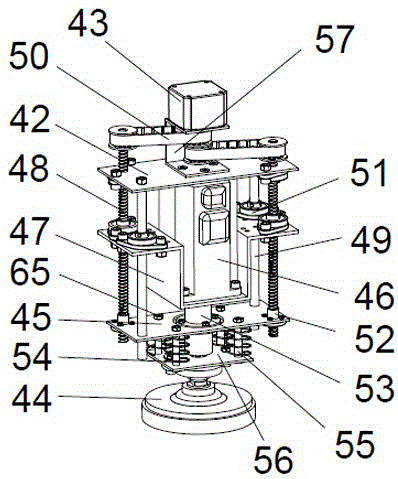
[0033] With reference to accompanying drawing, a kind of wall surface grinding wall-climbing robot is equipped with action device, grinding device on frame 41, and grinding device is installed on the two-degree-of-freedom moving device;
[0034] The two-degree-of-freedom mobile device includes a stepping motor, a synchronous belt, a slide rail, a slide plate and a working slide block. Y-direction slide rails 8 are arranged on both sides of the frame, and chute slots are provided at the lower end of the slide plate 12 corresponding to the two Y slide rails. 81. The slide plate and the slide rail are connected through the structure of the slider chute; two synchronous motors 1 and 3 are respectively installed on the same side of the two Y-direction slide rails, and two reversing wheels 9 and 10 are respectively installed on the two Y-direction slide rails. To the other side of the slide rail, four transmission bushings 4, 5, 13, 14 are fixed on the slide plate; two ends of a sync...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com